Gesture-Controlled Hydraulic Robotic Arm
تفاصيل العمل
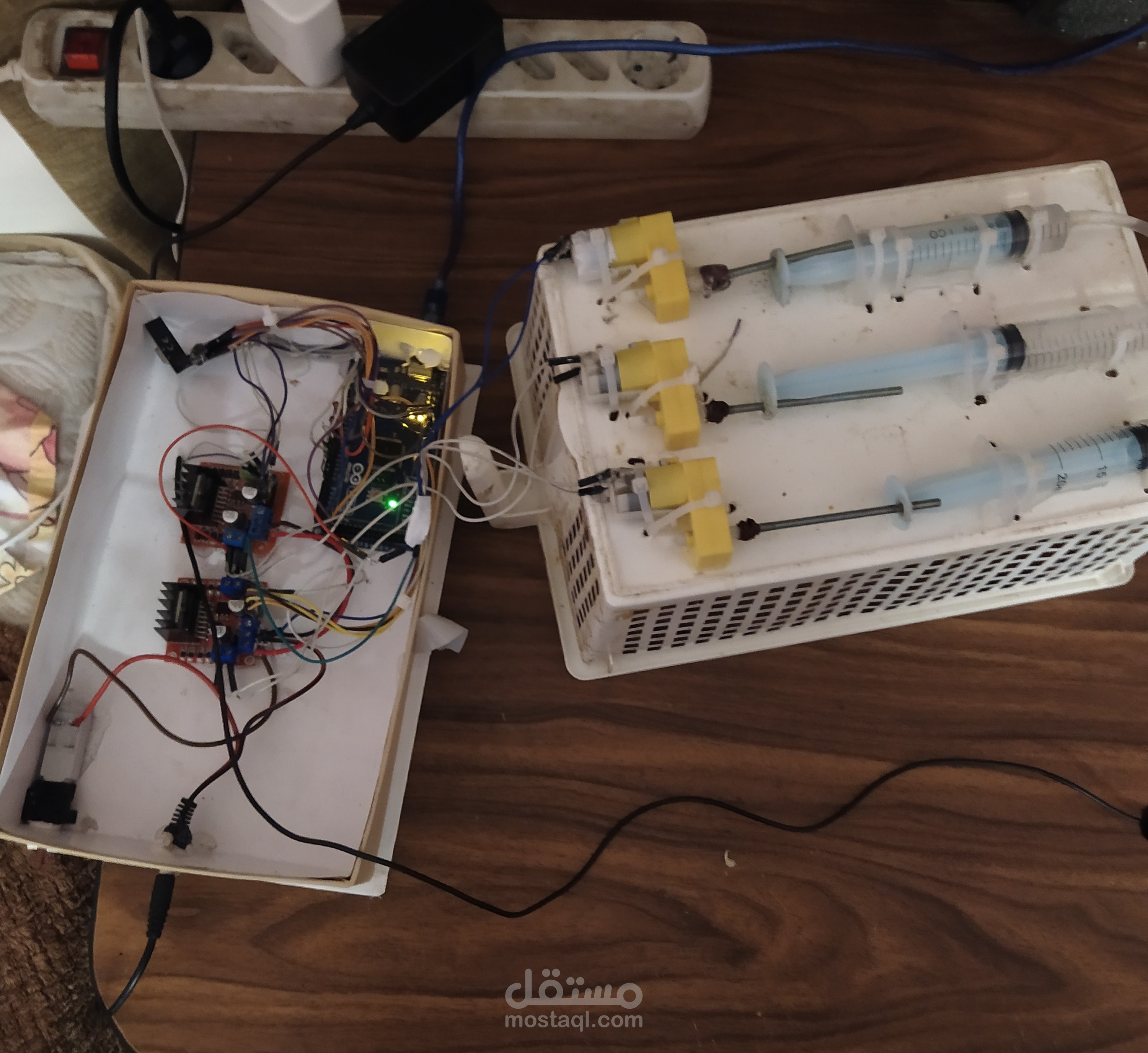
ذراع روبوت هيدروليكي يعمل بالتحكم بالإيماءات
التصنيف: الأنظمة المضمنة | التفاعل بين الإنسان والآلة
مشروع ذراع روبوت يتم التحكم به بالكامل عن طريق حركات اليد، حيث يتم تحويل الإيماءات في الزمن الحقيقي إلى حركة هيدروليكية سلسة. يعتمد النظام على حساس MPU6050 مع اتصال لاسلكي باستخدام NRF، مما يتيح تحكمًا بديهيًا يشمل دوران 360 درجة للقاعدة وحركة الذراع للأعلى والأسفل. تم تصميم المشروع كنظام عملي منخفض التكلفة يوضح مفهوم التحكم بالإيماءات بدون وسائل تحكم تقليدية.
أهم المميزات:
تحكم لحظي بالإيماءات
اتصال لاسلكي
تشغيل هيدروليكي سلس
تفاعل طبيعي بين الإنسان والآلة