Teleoperated Robot Arm_PCB
تفاصيل العمل
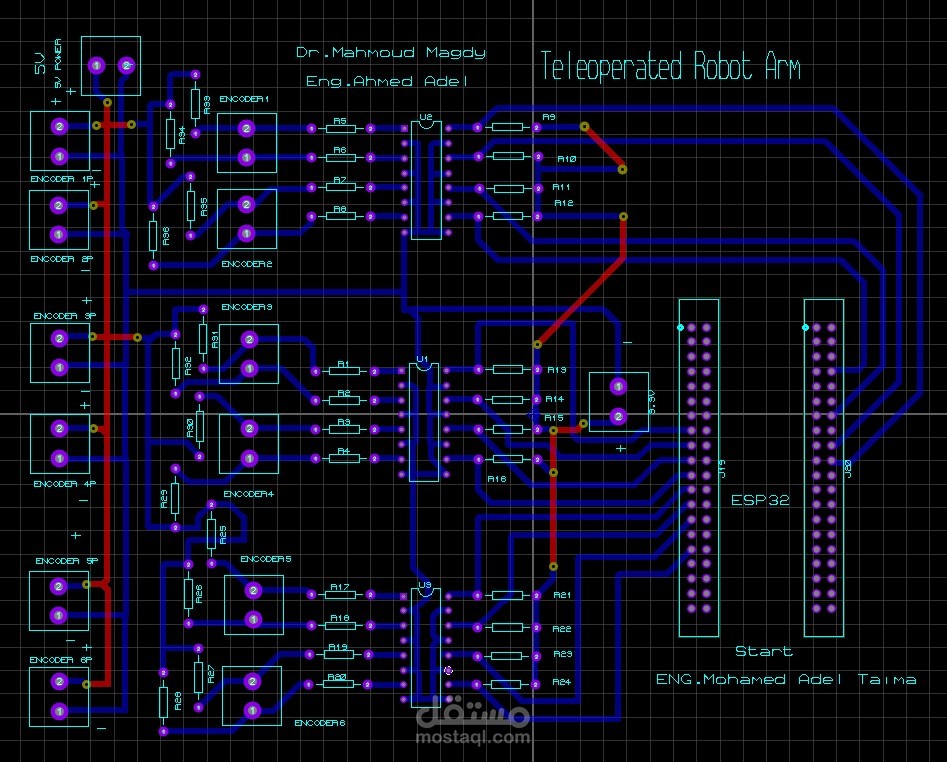
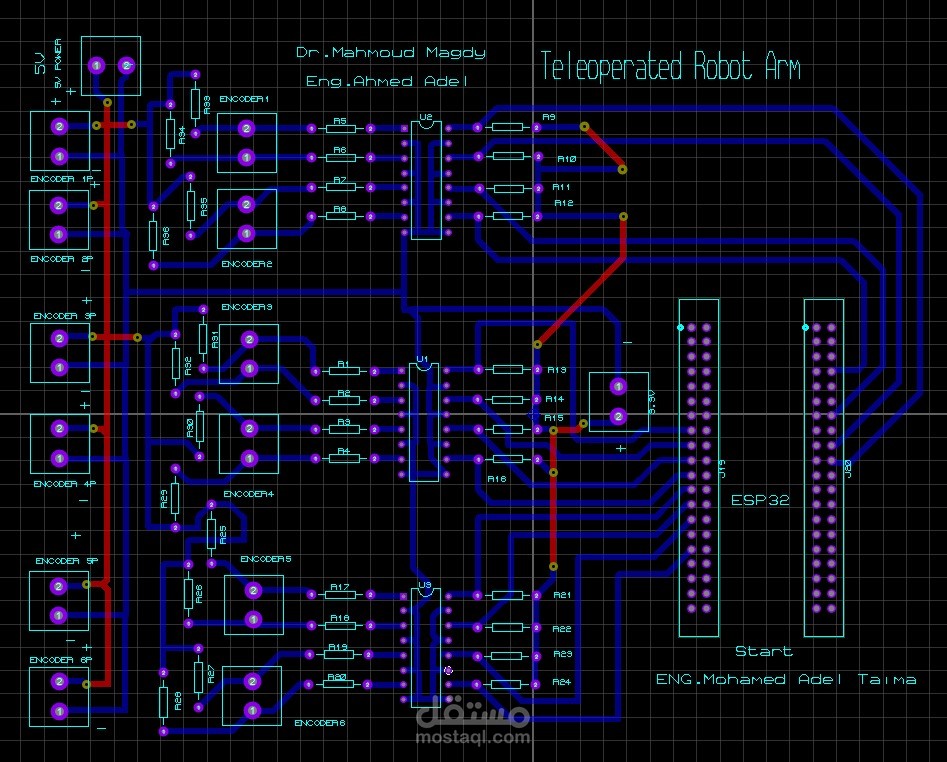
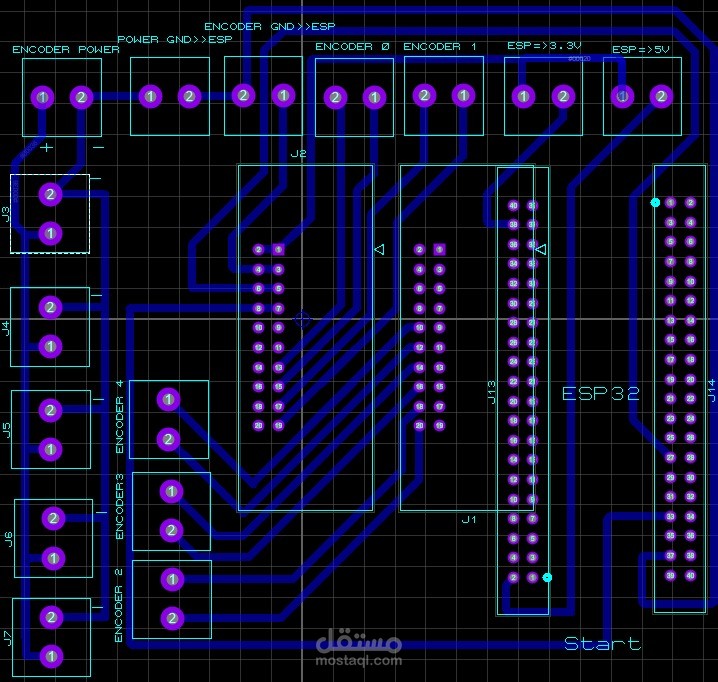
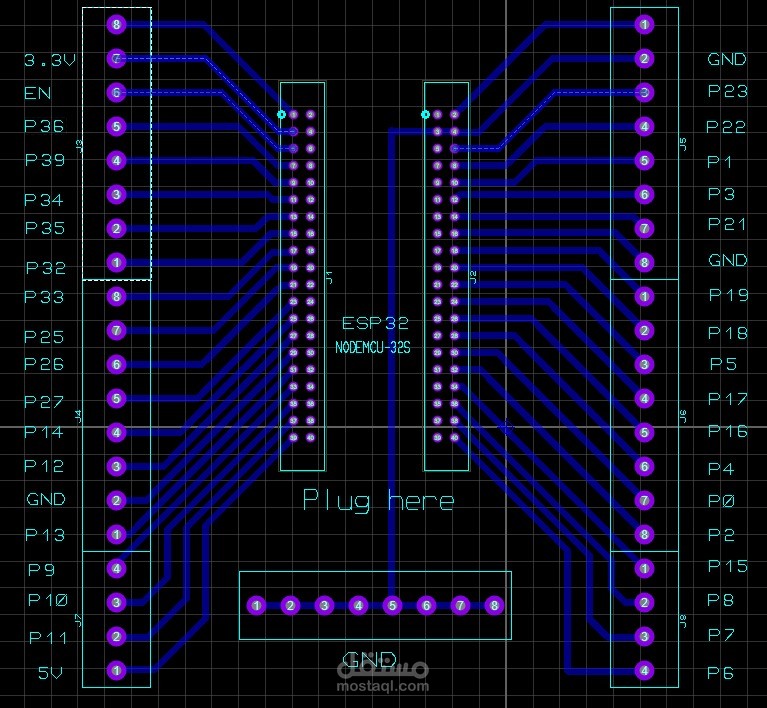
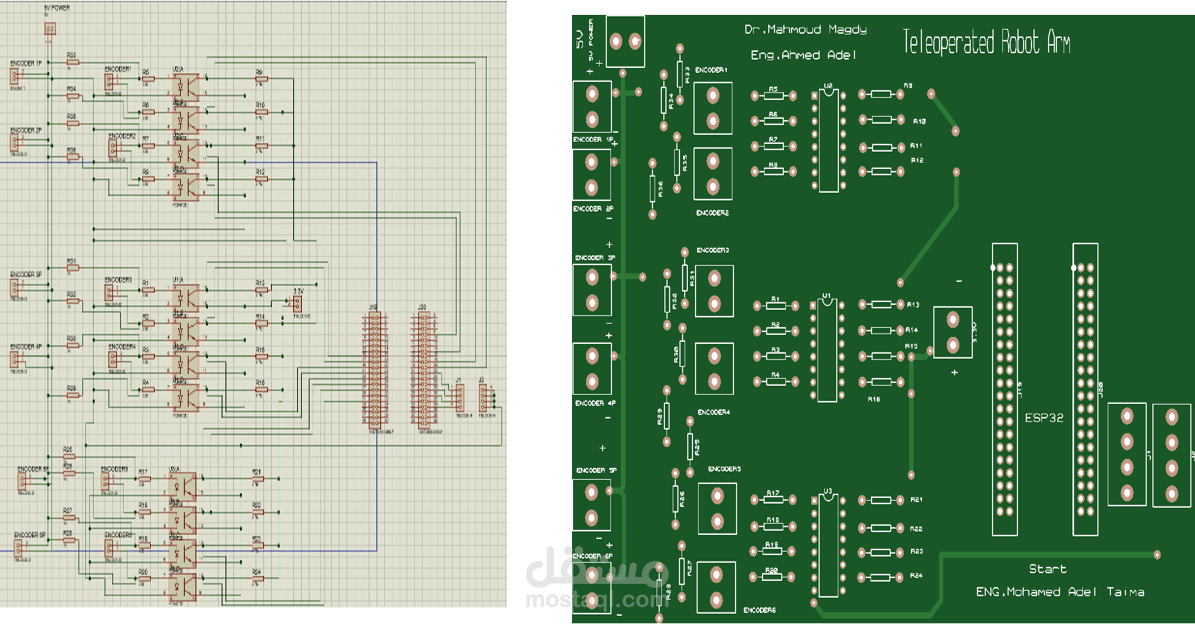
تم تصميم ثلاث دوائر إلكترونية للمشروع:
-أول دائرة كانت خاصة بذراع الروبوت الرئيسي لاستقبال البيانات من الذراع ثم تقليل الضوضاء و معالجة الإشارة ثم نقلها إلى الذراع التابع.
-ثان دائرة خاصة بزراع الروبوت التابع لالتقاط البيانات من الذراع الرئيسي ثم معالجة البيانات و التحكم في الذراع التابع.
-ثالث دائرة خاصة بوحدة تحكم NodeMCU ESP32-S لسهولة التوصيل وزيادة عدد المخارج.