Autonomous object detection
تفاصيل العمل
يهدف هذا المشروع إلى تطوير نظام متكامل لإدراك ومراقبة البيئة المحيطة بالمركبات ذاتية القيادة (Vehicle Perception System) باستخدام أحدث تقنيات تعلم الآلة. يركز النظام على الكشف الدقيق والسريع عن الكائنات في بيئات ديناميكية مختلفة لضمان الأمان والموثوقية.
مراحل العمل والمنهجية: تم تنفيذ المشروع وفق خارطة طريق (Roadmap) شملت 5 مراحل أساسية لضمان الجودة والأداء:
تجهيز ومعالجة البيانات (Data Foundation):
تجميع وتنقيح بيانات القيادة العامة واستخدام بيانات COCO.
تطبيق تقنيات المعالجة المسبقة مثل تغيير حجم الصور (Image Resizing) لتناسب مدخلات YOLO، وتطبيع قيم البكسل.
إجراء عمليات زيادة البيانات (Data Augmentation) المتقدمة مثل محاكاة الطقس وتغيير الإضاءة لتعزيز متانة النموذج.
تطوير النموذج (Model Development):
اعتماد خوارزمية YOLOv8 نظرًا لتوازنها المثالي بين السرعة والدقة مقارنة بـ YOLOv5 و Faster R-CNN.
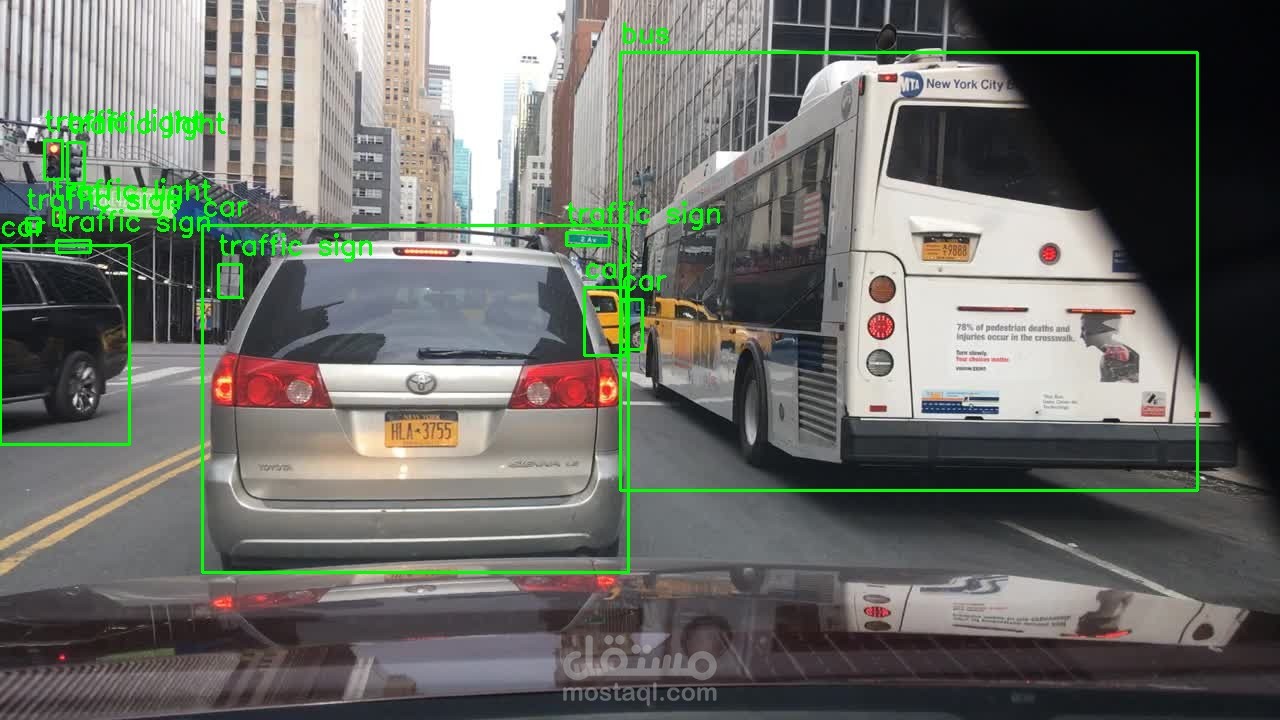
إعادة تدريب النموذج (Fine-tuning) للتعرف على فئات السيارات الهامة: المشاة، المركبات، إشارات المرور، والعوائق.
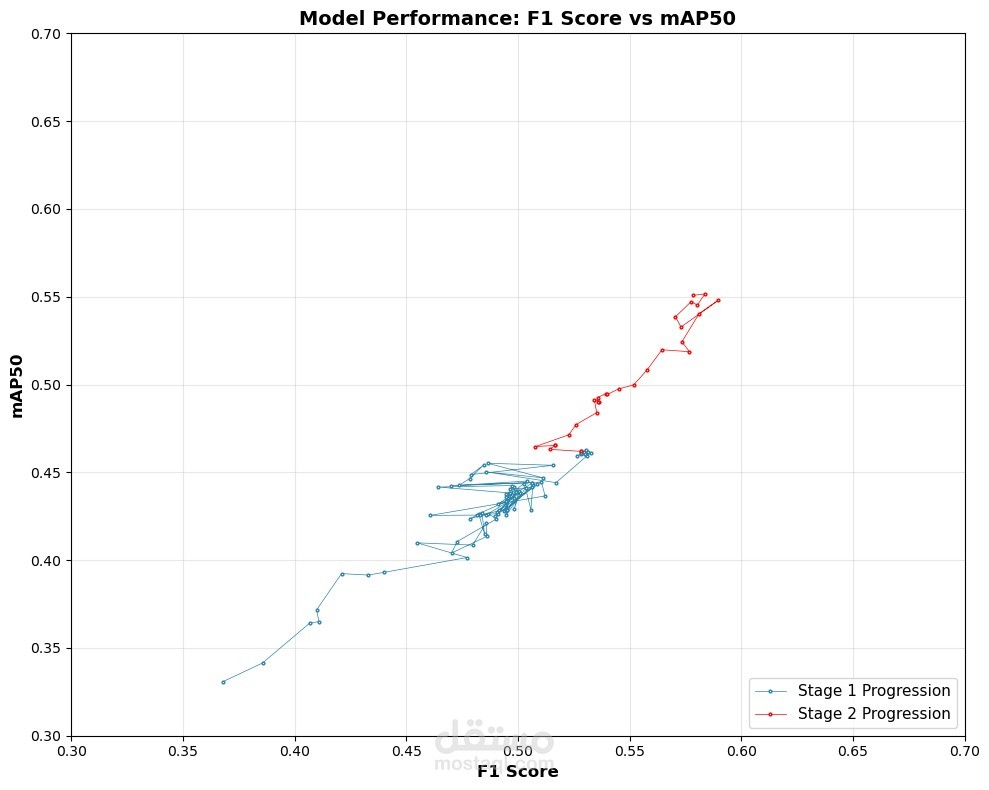
ضبط المعاملات الفائقة (Hyperparameter tuning) بشكل تكراري للوصول لأفضل أداء.
النشر والاختبار في الوقت الفعلي (Deployment & Real-Time Testing):
تحويل النموذج إلى صيغ خفيفة مثل ONNX أو TensorRT لتحسين الأداء.
نشر النموذج واختباره داخل بيئة محاكاة CARLA وعلى أجهزة طرفية (Edge Devices) مثل Jetson Nano.
قياس معايير الأداء الحرجة مثل التأخير (Latency) وعدد الإطارات في الثانية (FPS).
عمليات تعلم الآلة (MLOps):
بناء خط أنابيب CI/CD للتكامل والنشر المستمر.
أتمتة إعادة تدريب النموذج باستخدام أدوات التحكم في النسخ (Git + DVC) لضمان استدامة النظام.
أهم النتائج:
تحقيق كفاءة عالية في الوقت الفعلي (Real-time Efficiency) ودقة عالية في الكشف.
نظام قابل للنشر يعمل بفعالية في السيناريوهات الديناميكية المتغيرة.
التقنيات والأدوات المستخدمة:
Model: YOLOv8
Simulation: CARLA Simulator
Deployment: ONNX, TensorRT, Jetson Nano
MLOps: Git, DVC, CI/CD Pipelines
Frameworks: PyTorch, Python