تطوير نظام Back Angle لقياس انحراف الظهر باستخدام MPU6050 + شاشة OLED + محركات اهتزاز
تفاصيل العمل
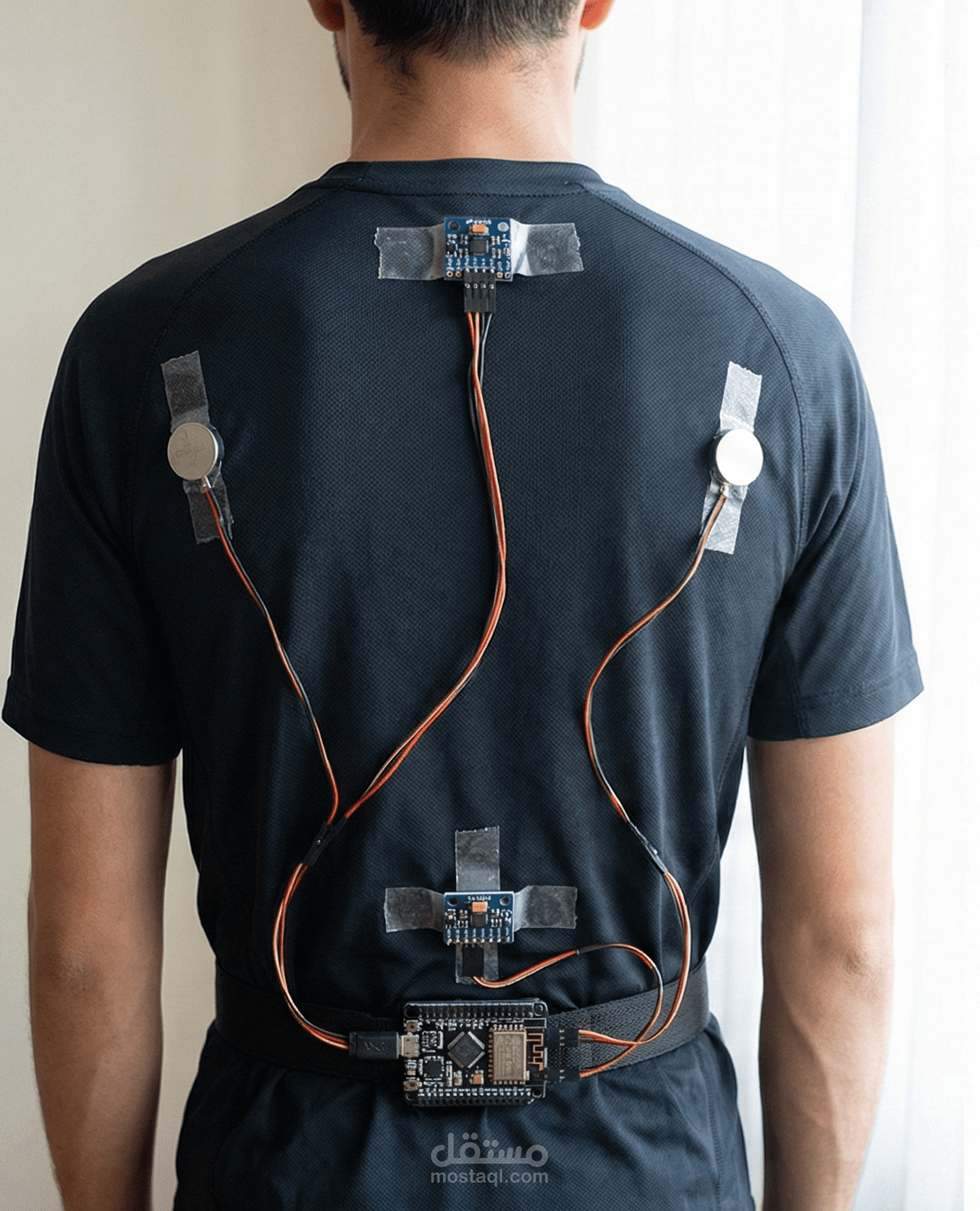
قمت بتطوير نظام Back Angle وهو نظام احترافي لقياس زاوية انحراف الظهر باستخدام زوج من مستشعرات MPU6050 مع دمج بيانات Accelerometer + Gyroscope باستخدام Kalman Filter للحصول على قياس دقيق ومستقر.
يعرض النظام زاوية الانحراف الفعلية على شاشة OLED SSD1306 ويقوم بتفعيل محركات اهتزاز عند تجاوز المستخدم زاوية غير صحية (Threshold) مع إمكانية تغيير الإعدادات من خلال Serial.
? مميزات النظام
قراءة بيانات 2× MPU6050 عبر I2C وتطبيق معايرة تلقائية للجيروسكوب (500 Sample).
حساب زاوية الظهر بدقة عالية باستخدام Kalman Sensor Fusion.
شاشة OLED تعرض القيمة بشكل واضح ومركزي + رموز تنبيه (Animated Arrows).
وضعين للتشغيل:
AUTO: يهتز الجهاز عند تجاوز العتبة.
MANUAL: تعطيل الاهتزاز.
تحكم كامل من خلال Serial:
تشغيل/إيقاف Auto Mode
ضبط Threshold
تغيير قوة الاهتزاز (PWM)
تعديل مدة الاهتزاز
تخزين قيم العتبة داخل EEPROM للحفاظ عليها بعد الإطفاء.
اهتزاز مزدوج (يسار + يمين) يعطي تنبيه واضح للمستخدم.
تصميم مناسب لمشاريع تحسين Posture / Ergonomic Devices.