Introducing My Custom 5-DOF Robotic Arm
تفاصيل العمل
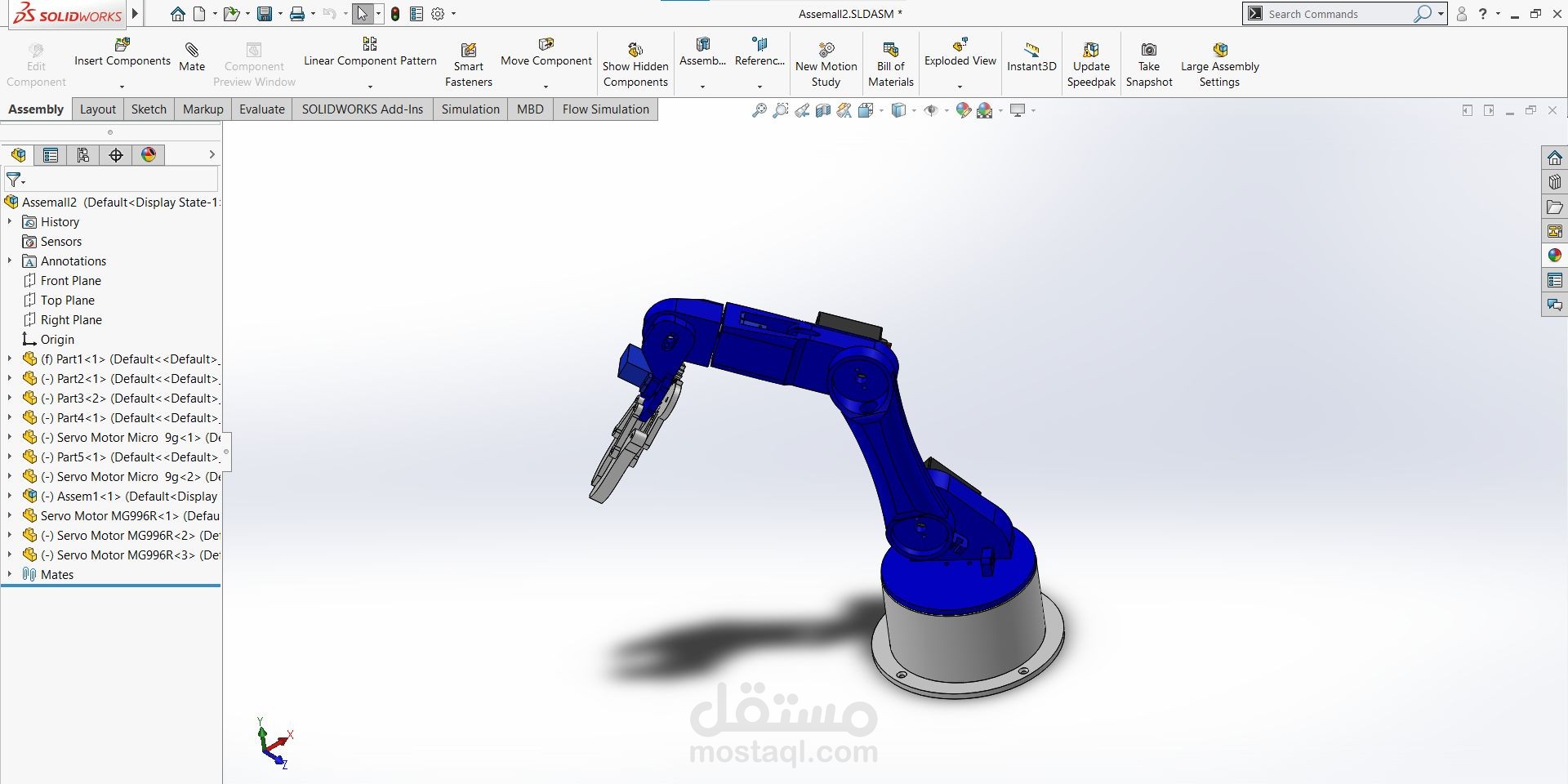
Over the past few weeks, I’ve been developing a fully articulated 5-DOF robotic arm, and I’m excited to share the final 3D model.
This project showcases a complete mechanical design workflow—from joint planning to full assembly modeling.
Key Features
5 Degrees of Freedom enabling complex motion and smooth articulation
Powered by MG996R and 9g micro servos for reliable actuation
Modular, easy-to-assemble architecture suitable for rapid prototyping
Lightweight and fully 3D-printable using PLA
Functional end-effector gripper for basic pick-and-place applications
What I Applied & Learned
This project helped me deepen my understanding of:
Mechanical design & SolidWorks assemblies
Joint kinematics and motion planning
Servo motor integration and torque considerations
3D modeling for real-world prototyping