embedded Systems_Autonomous Car
تفاصيل العمل
Project Title: Autonomous Car (Obstacle Avoidance Robot)
1. Project Overview & Objective This project focuses on the development of a self-driving car capable of detecting and avoiding obstacles with a high-speed response. The system is designed to navigate its environment autonomously by making real-time decisions based on sensor feedback to ensure collision-free movement.
2. Operational Logic The system operates using an ATmega32 microcontroller that integrates various peripherals to control the vehicle's behavior. The operation workflow is as follows:
Front Obstacle Detection: When the front ultrasonic sensor detects an obstacle within 20 cm, the car stops immediately.
Scanning & Decision Making: The system scans the surrounding area (approximately four degrees) to identify an available path and turns the vehicle towards the open space.
Backward Maneuver: If no forward path is available, the car reverses until a suitable space is found.
Rear Obstacle Detection: During backward movement, a rear ultrasonic sensor scans the area; if an object is detected, the motion is reversed again to prevent a collision.
3. Software Architecture The project utilizes a Layered Architecture to ensure code modularity and portability. It is divided into three distinct layers:
MCAL (Microcontroller Abstraction Layer): Manages the firmware for microcontroller peripherals such as DIO, ADC, Timers, and Interrupts.
HAL (Hardware Abstraction Layer): Contains device drivers for external hardware components like the LCD, Motors, and Sensors.
Application Layer: Houses the high-level code and logic for the "Autonomous Car" application.
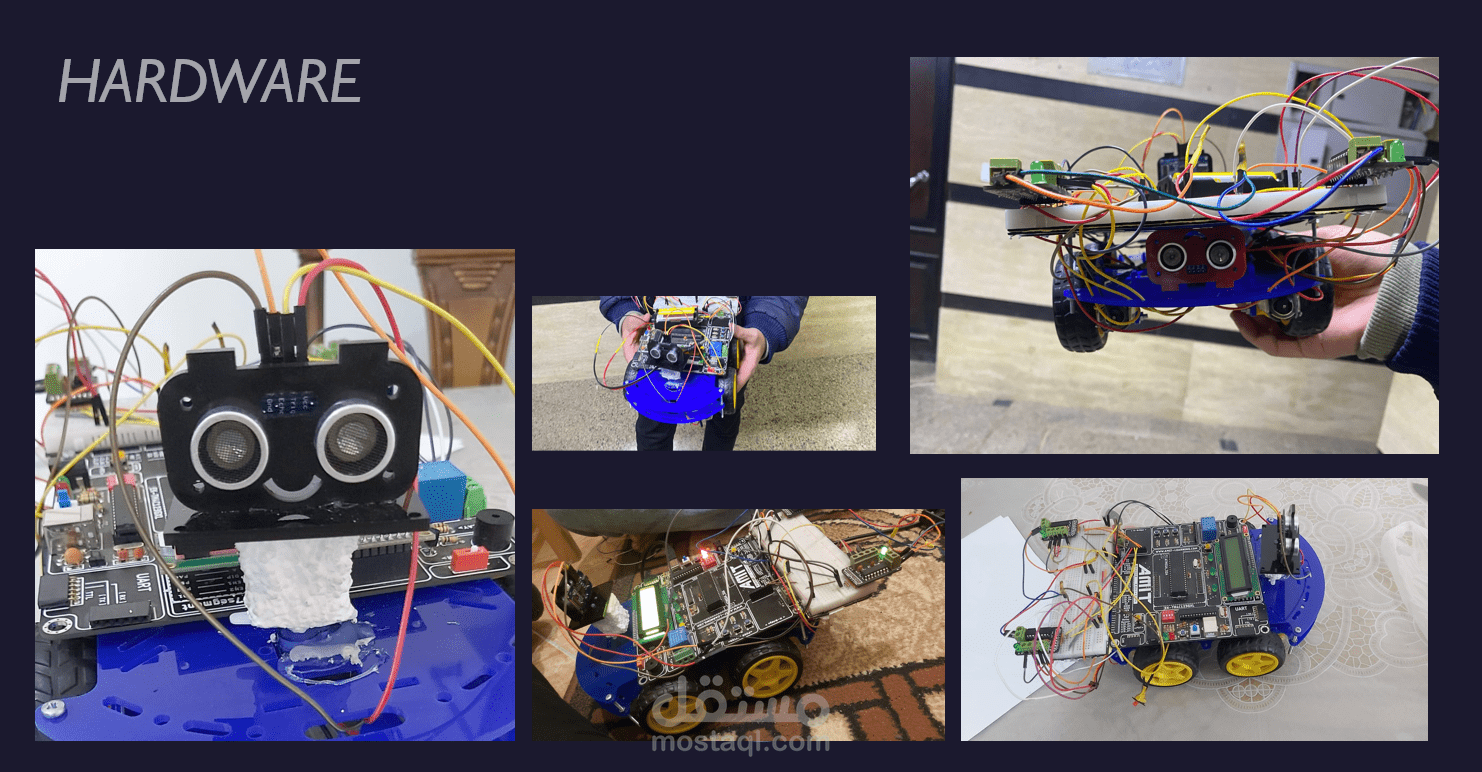
4. Hardware Components & Drivers The system is built upon the following hardware components, controlled by specific drivers and timers:
Microcontroller: ATmega32.
Ultrasonic Sensors (HC-SR04): Used for distance measurement.
Front Sensor: Configured using Timer2 (Normal Mode) and External Interrupt 0.
Back Sensor: Configured using Timer0 (Normal Mode) and External Interrupt 2.
Servo Motor: Used for scanning the environment, controlled via Timer 1 (Mode 14: Fast PWM).
DC Motors: Four motors driven by the L293D H-Bridge Driver.
Display: 16x2 LCD screen for status output.
5. Future Enhancements The team has proposed additional features for future iterations, including:
RFID Integration: To prevent theft.
Flex Sensor Control: To allow the car's direction to be controlled via hand gestures.