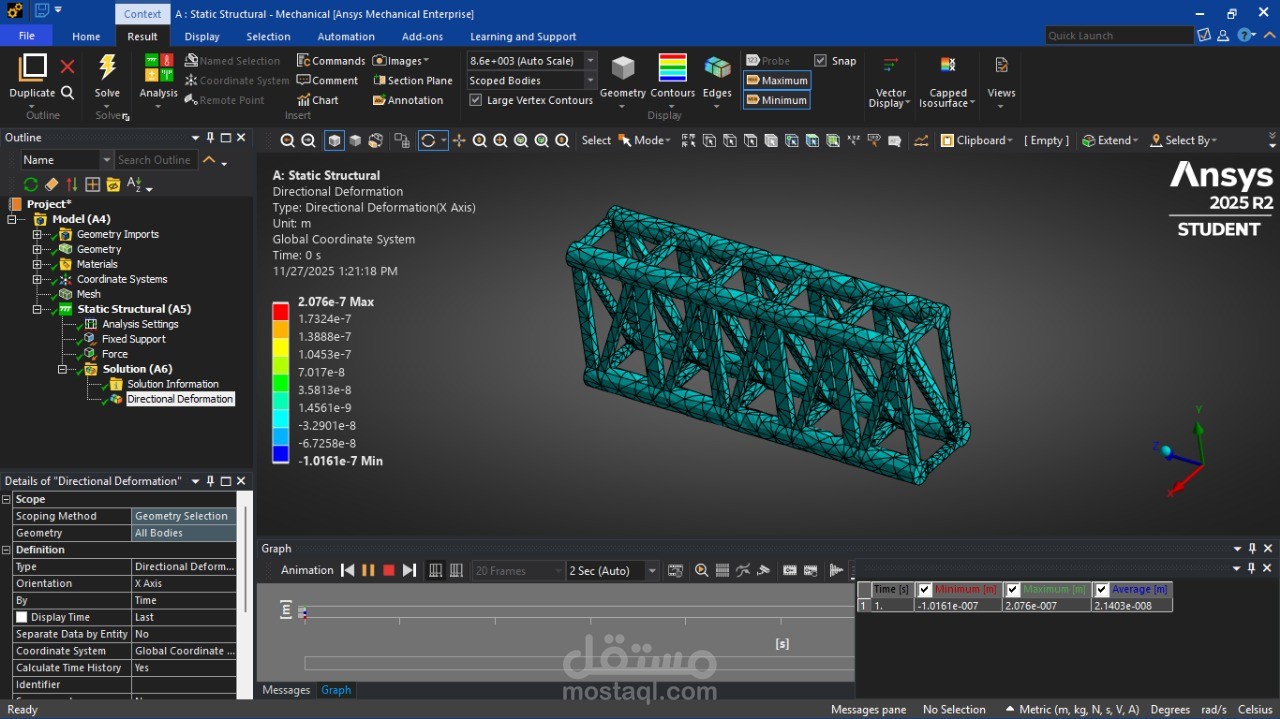
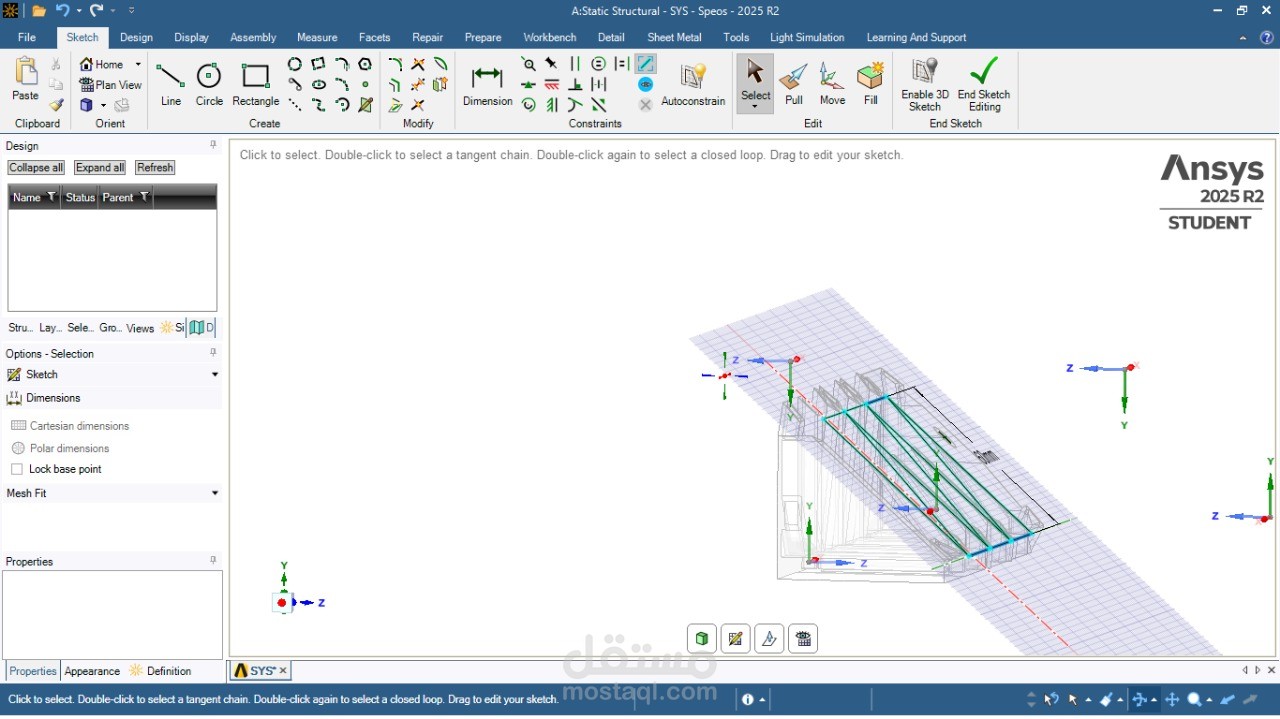
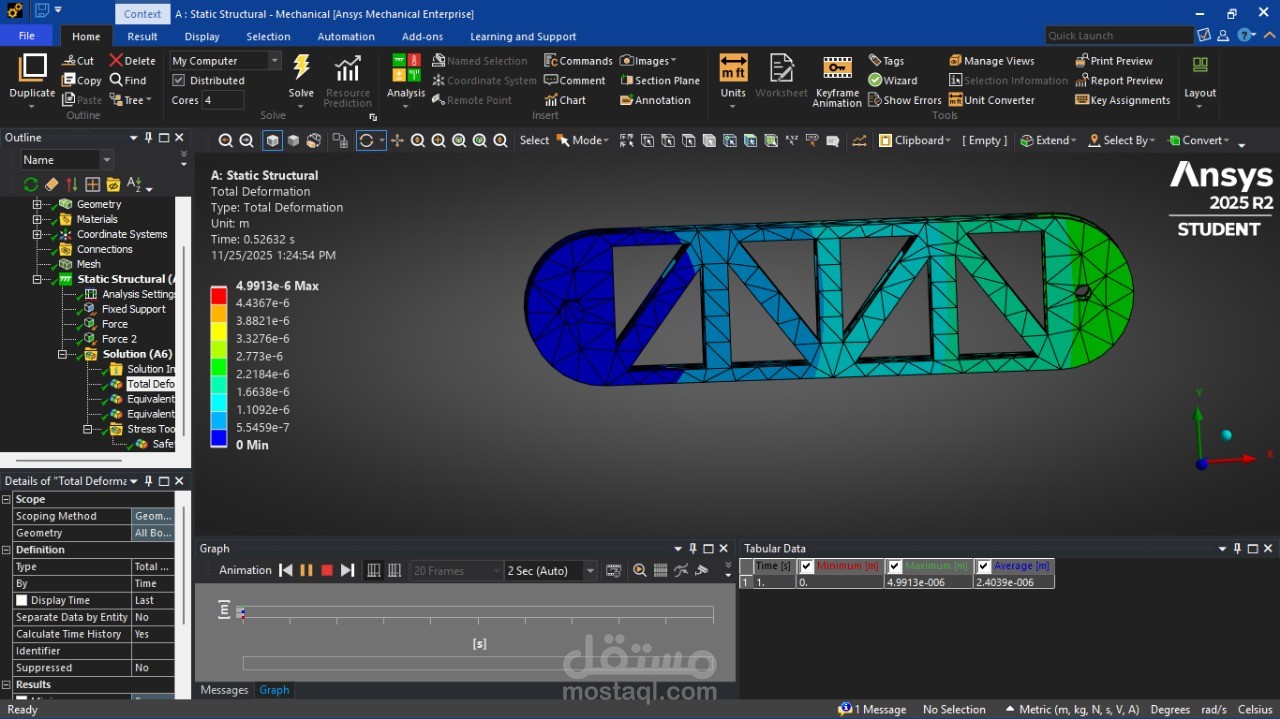
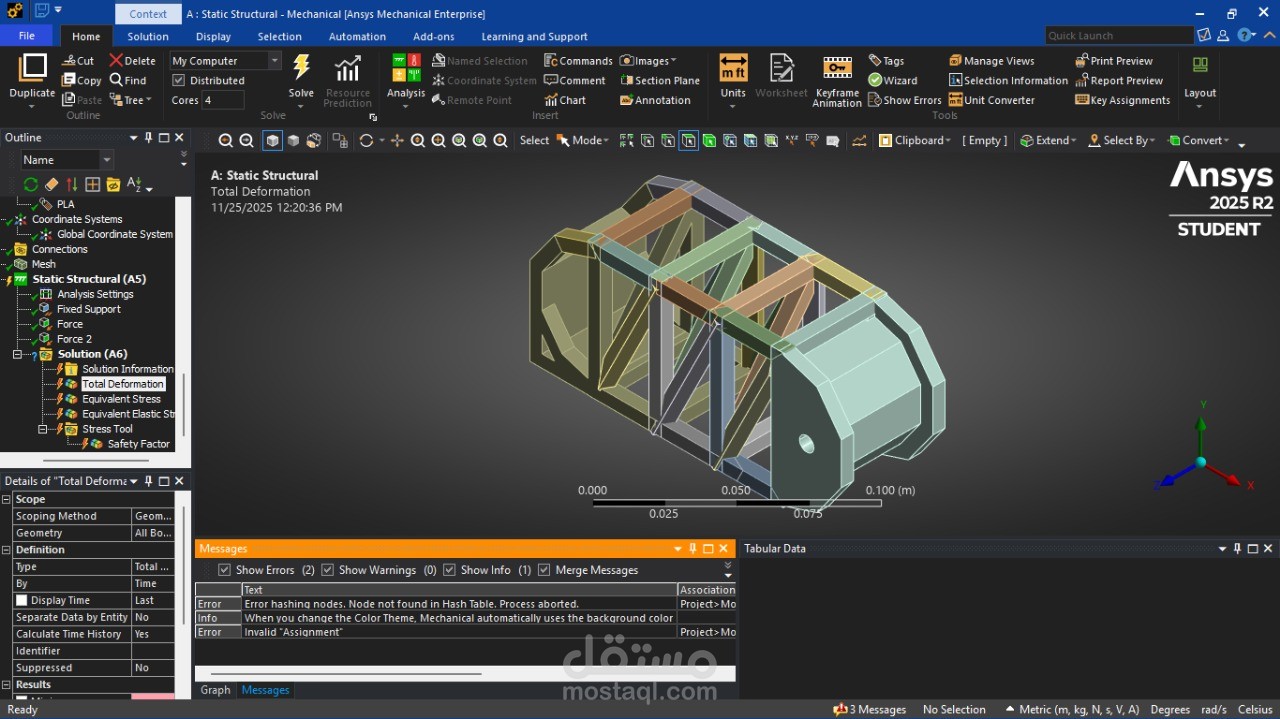
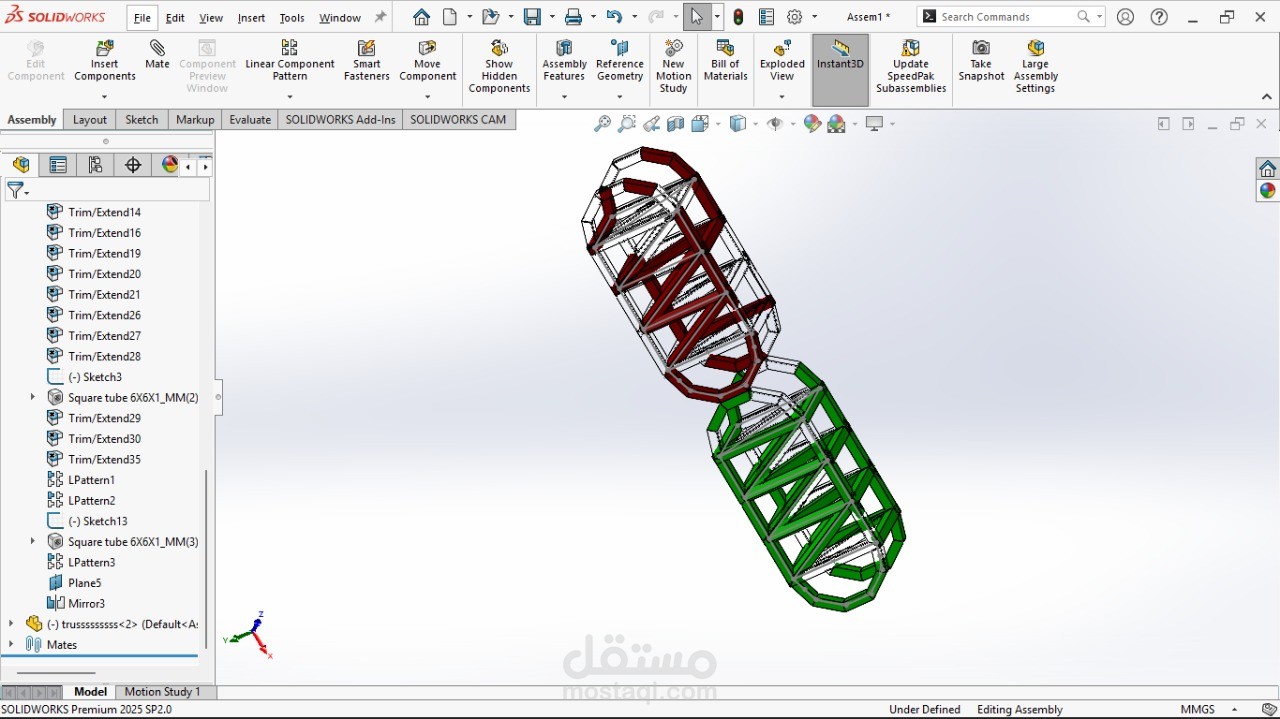
تصميم ذراع آلي يتحرك With 2-DOF ومحاكته بواسطة برنامج ANSYS
تفاصيل العمل
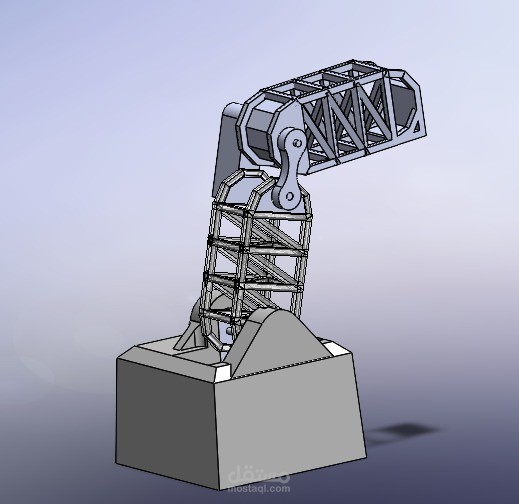






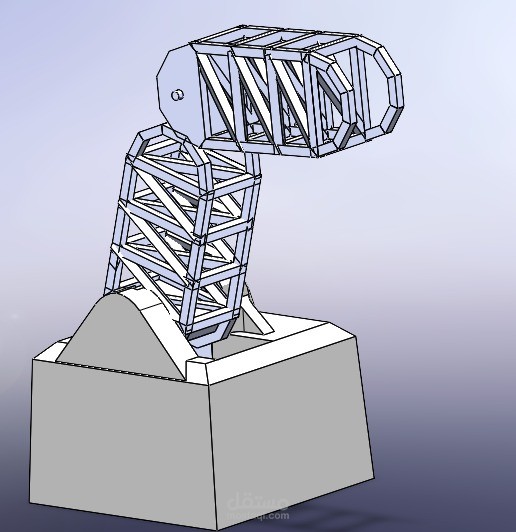
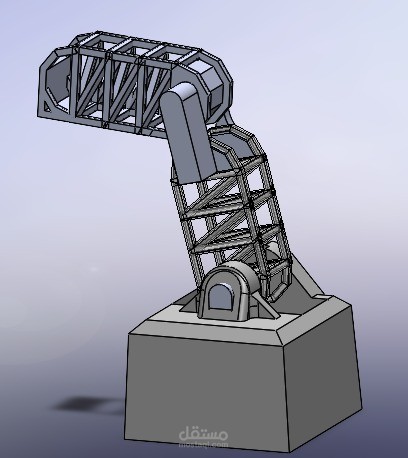
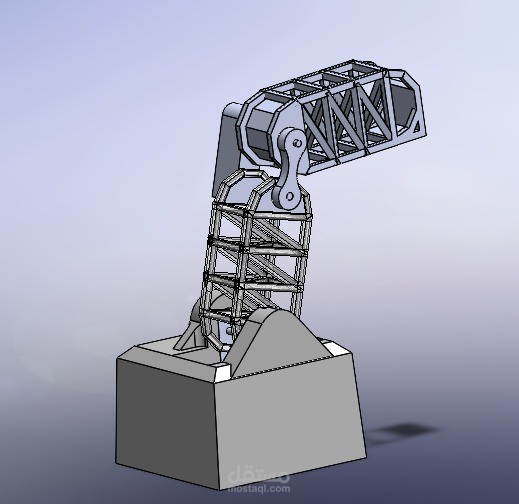
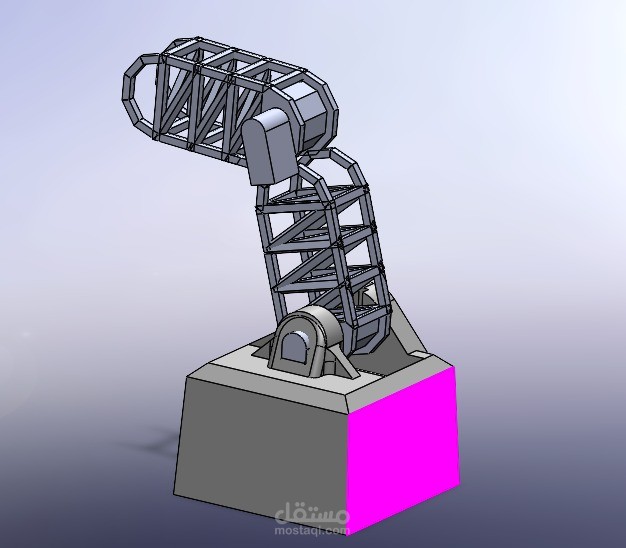
This robotic arm will left three weights are different in size and mass with different places coded by ROS and controlled by raspberry hardware.
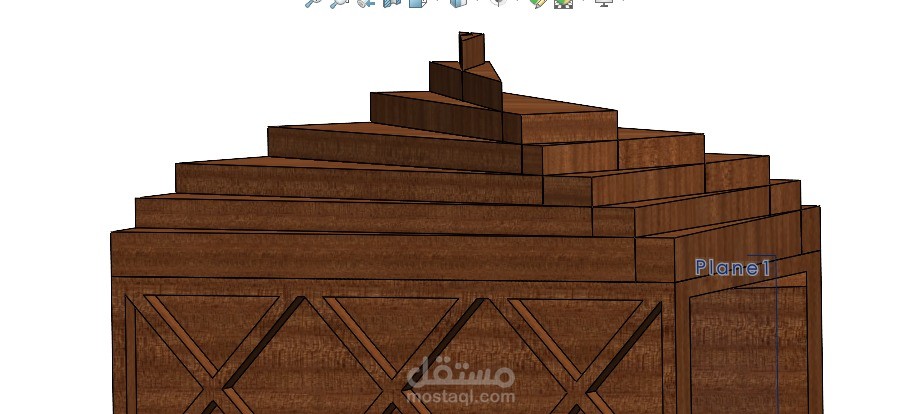
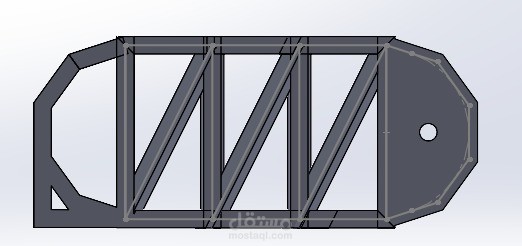
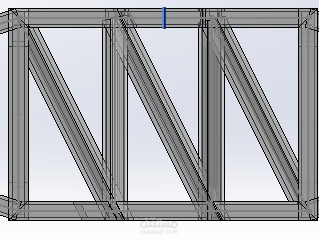
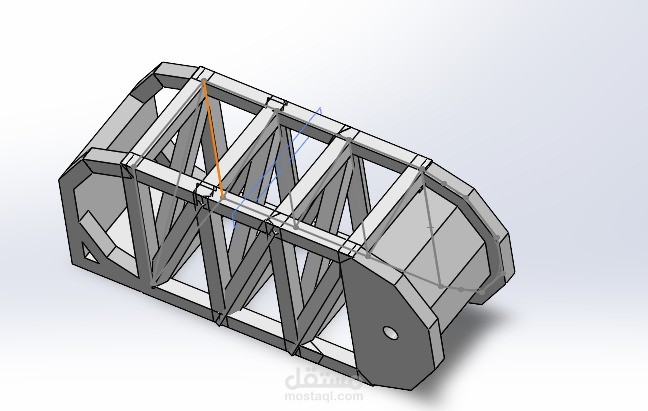
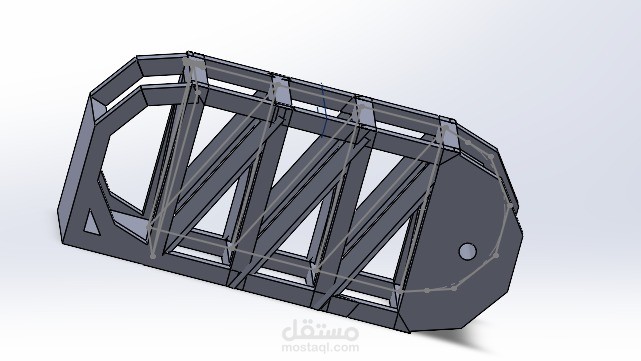
I designed the links with this form of trusses to decrease the the weight of the link and to have the best stiffness what mean we use less material with maximum stiffness we want to implement the its tasks effectively.