مشروع التخرج
تفاصيل العمل

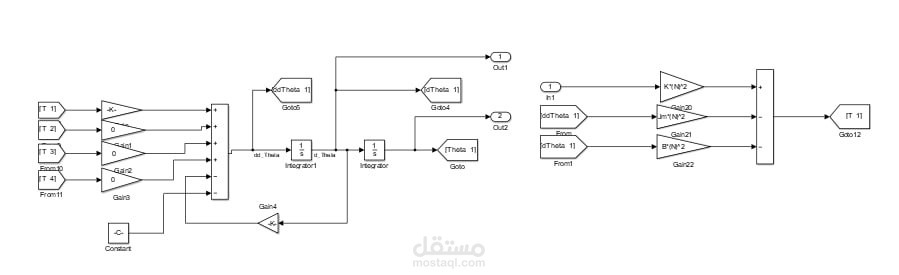
تصميم وتنفيذ ذراع روبوت بأربع درجات حرية باستخدام MATLAB وSimulink وربطها مع متحكم ESP32.
تطبيق متحكمات PID وLQR وLQI ومتحكم ضبابي للتحكم في الحركة، مع تنفيذ عملية فرز للأجسام حسب اللون باستخدام حساس ألوان TCS230.