تصميم نموذج ميكانيكي لمحاكاة حركة القدم البشرية (Artificial Foot Mechanism)
تفاصيل العمل
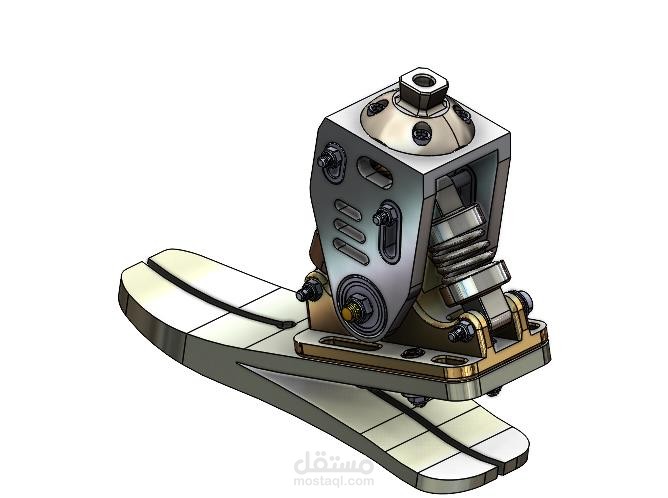

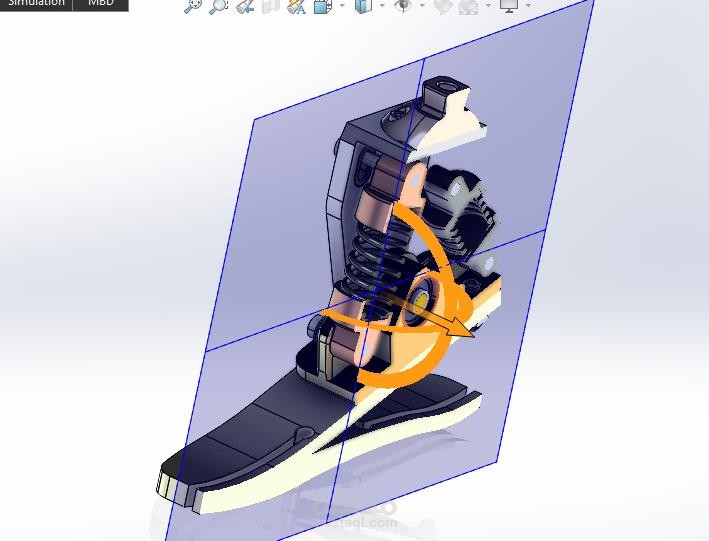
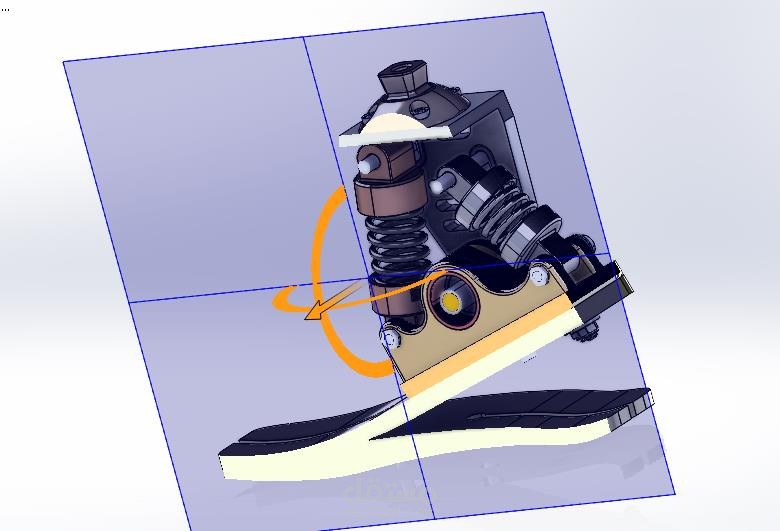
يمثل هذا النموذج تصميمًا ميكانيكيًا مبتكرًا لمحاكاة حركة القدم البشرية، ويهدف إلى دراسة آلية امتصاص الصدمات وتوزيع الأحمال أثناء المشي.
يتكون النظام من مجموعة من الأجزاء المترابطة ميكانيكيًا تشمل:
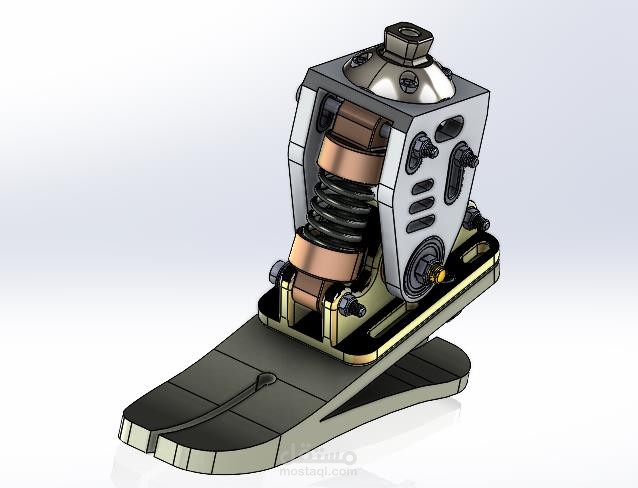
نوابض (Springs) لامتصاص الاهتزازات وتقليد مرونة المفصل الطبيعي.
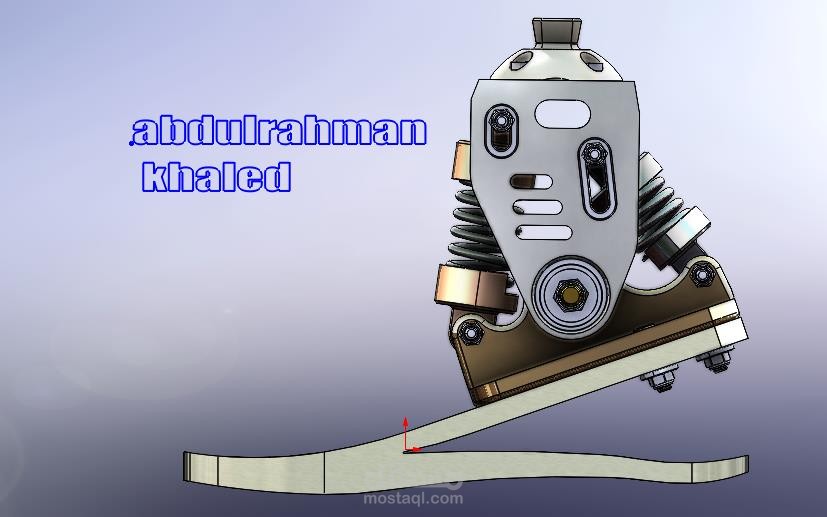
مفصل محوري (Pivot Joint) يسمح بالحركة الأمامية والخلفية للقدم.
هيكل معدني خفيف مصمم لتوفير الصلابة اللازمة مع تقليل الوزن.
يُستخدم هذا النوع من النماذج في مشاريع الأطراف الصناعية (Prosthetics) أو في تطوير أنظمة روبوتية تمشي (Biped Robots) بهدف تحقيق حركة طبيعية ومتوازنة.
تم تنفيذ التصميم باستخدام برنامج SolidWorks مع مراعاة تفاصيل الهندسة الميكانيكية والديناميكية لضمان أداء قريب من حركة القدم الحقيقية.