Robot Control using ROS
تفاصيل العمل
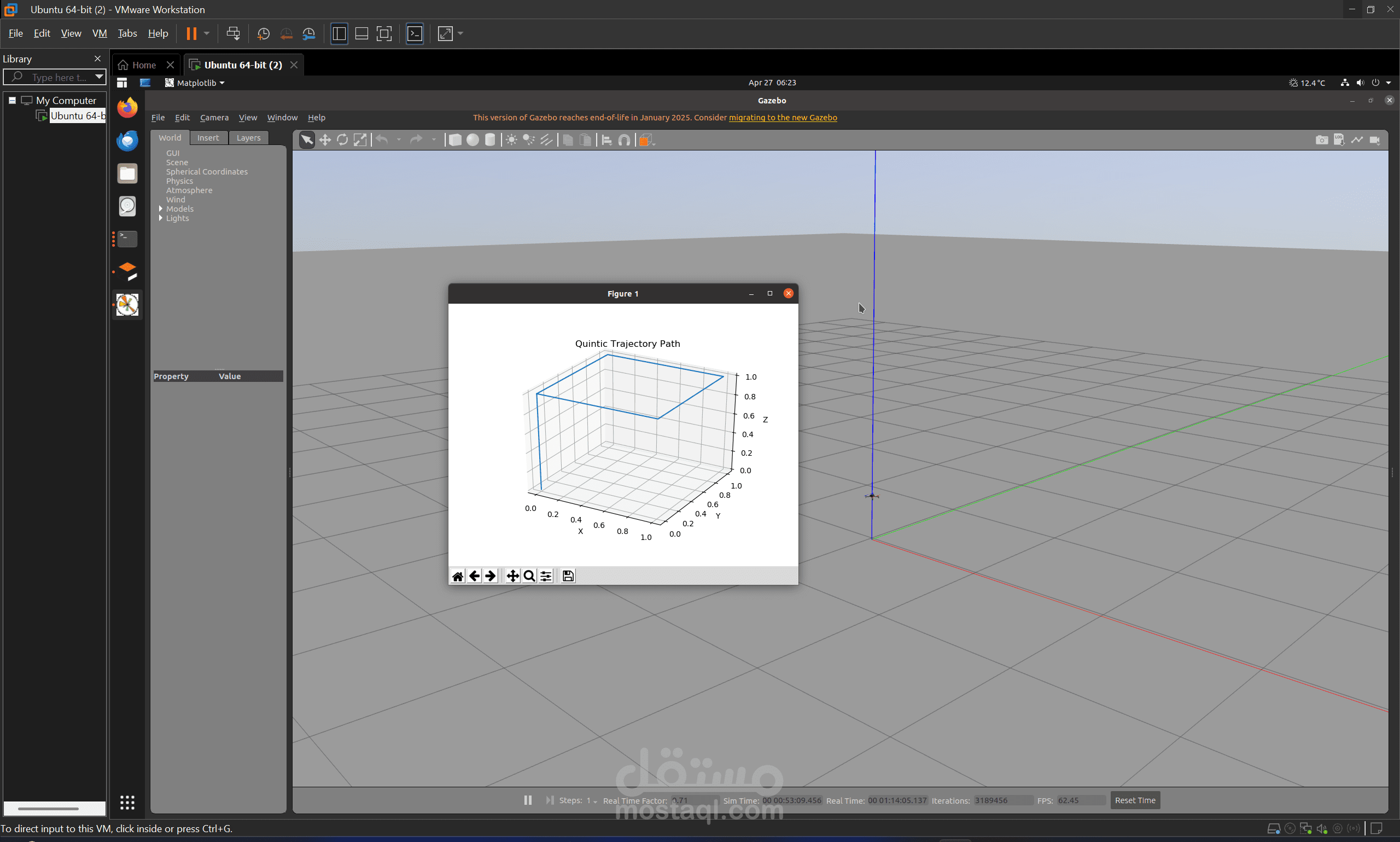
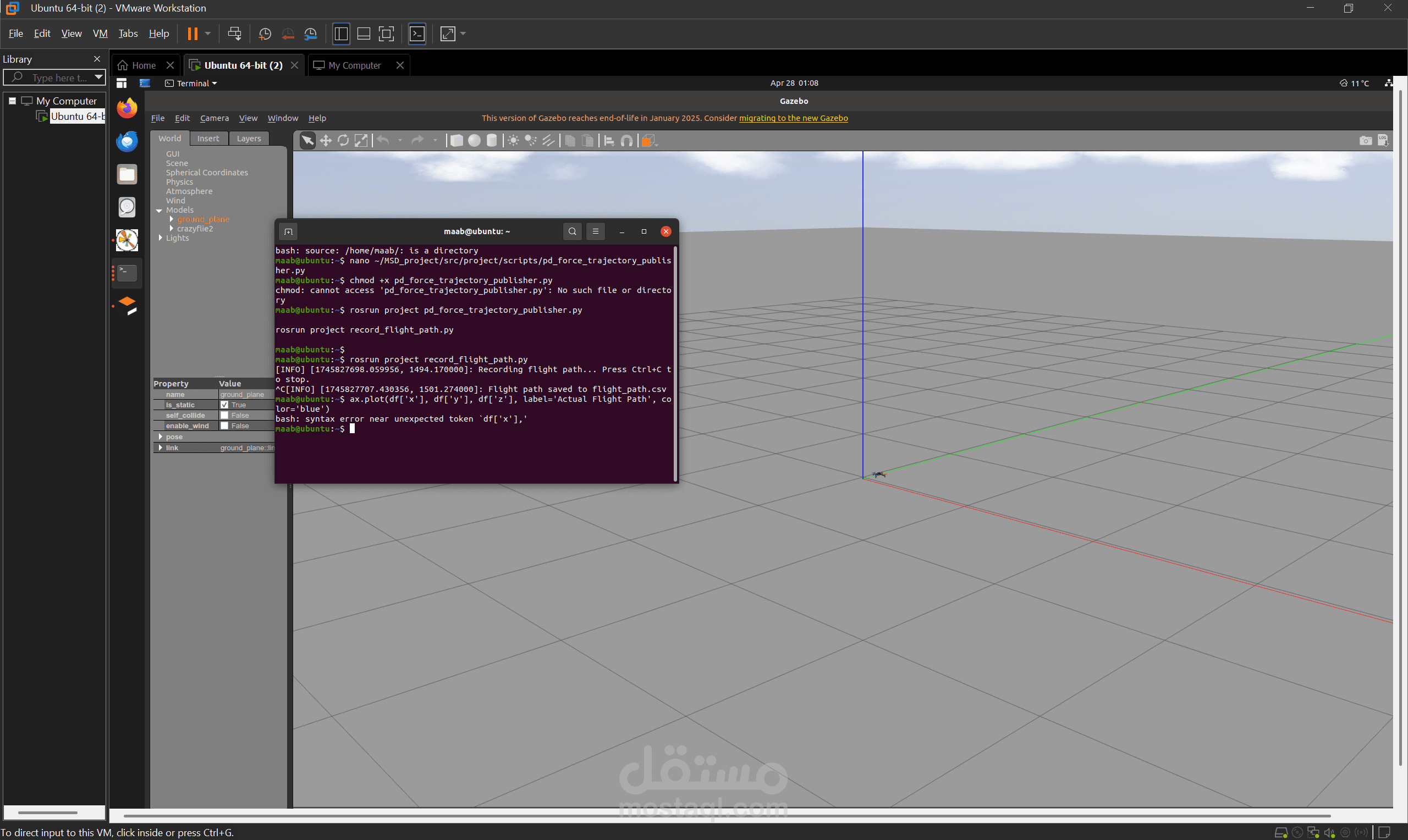
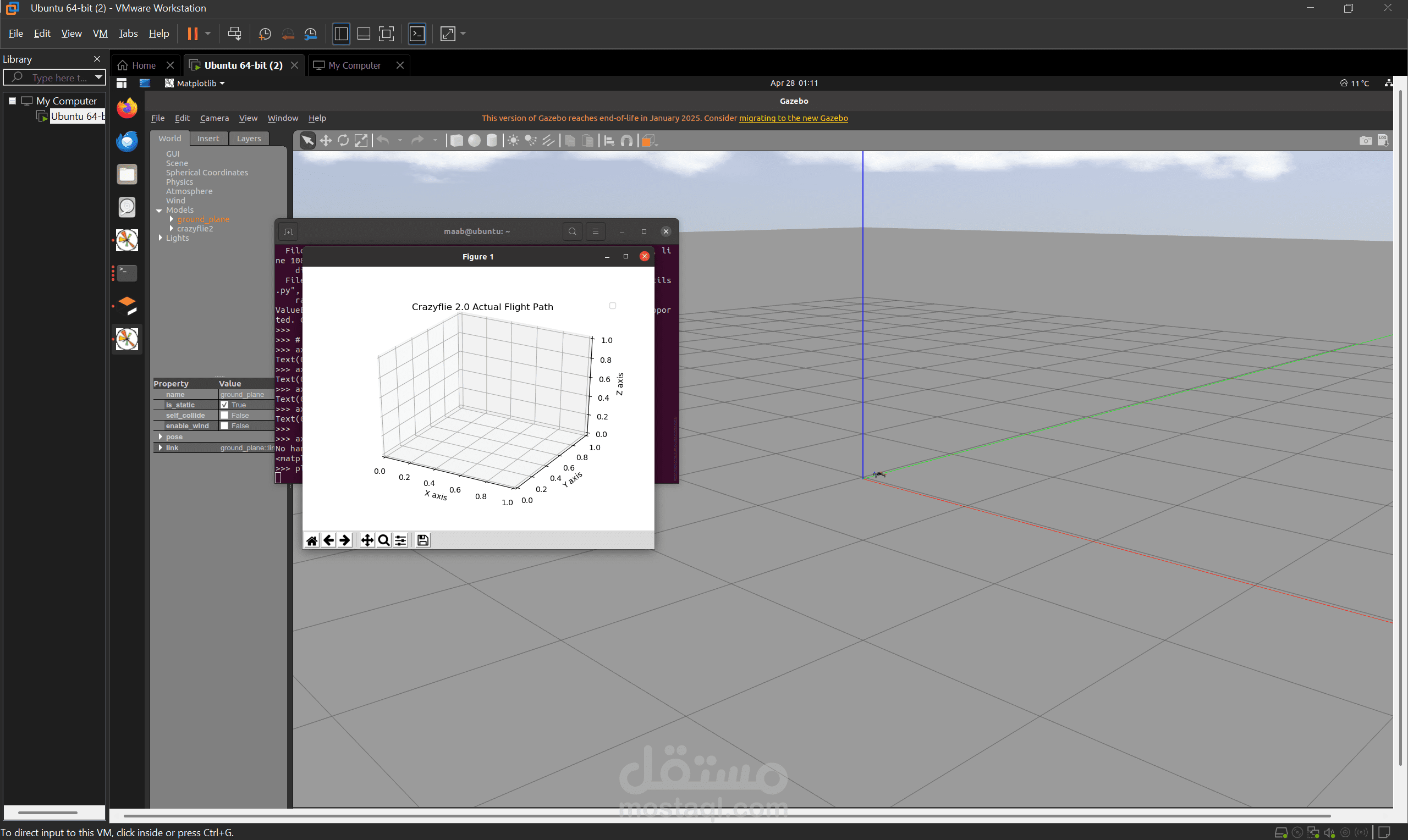
A robotics project developed using ROS (Robot Operating System).
The work focused on robot path control and sensor integration, demonstrating real-time data processing and autonomous navigation.