Real-Time Object Detection for Autonomous Vehicles (Under Development – Team Project)
تفاصيل العمل
يهدف هذا المشروع إلى تطوير نظام ذكي للكشف عن الأجسام في الزمن الحقيقي باستخدام تقنيات Computer Vision وDeep Learning، بهدف تعزيز أمان أنظمة القيادة الذاتية.
يقوم النظام بتحليل الصور المأخوذة من كاميرات المركبة واكتشاف وتصنيف الكائنات المختلفة مثل المشاة، السيارات، إشارات المرور، والعوائق في الوقت الفعلي، مما يساعد في اتخاذ قرارات دقيقة وسريعة أثناء القيادة.
يُنفَّذ المشروع ضمن فريق عمل من مسار الذكاء الاصطناعي وعلوم البيانات في مبادرة Digital Egypt Pioneers (DEPI)، تحت إشراف متخصصين في مجالات الرؤية الحاسوبية وMLOps.
Current Progress (Implemented in the .ipynb file)
حتى الآن، تم تنفيذ المراحل الأساسية التالية داخل الملف التنفيذي:
إعداد بيئة العمل على Google Colab وربط مكتبات التحليل والتعلم العميق (TensorFlow, Keras, OpenCV, NumPy, Matplotlib).
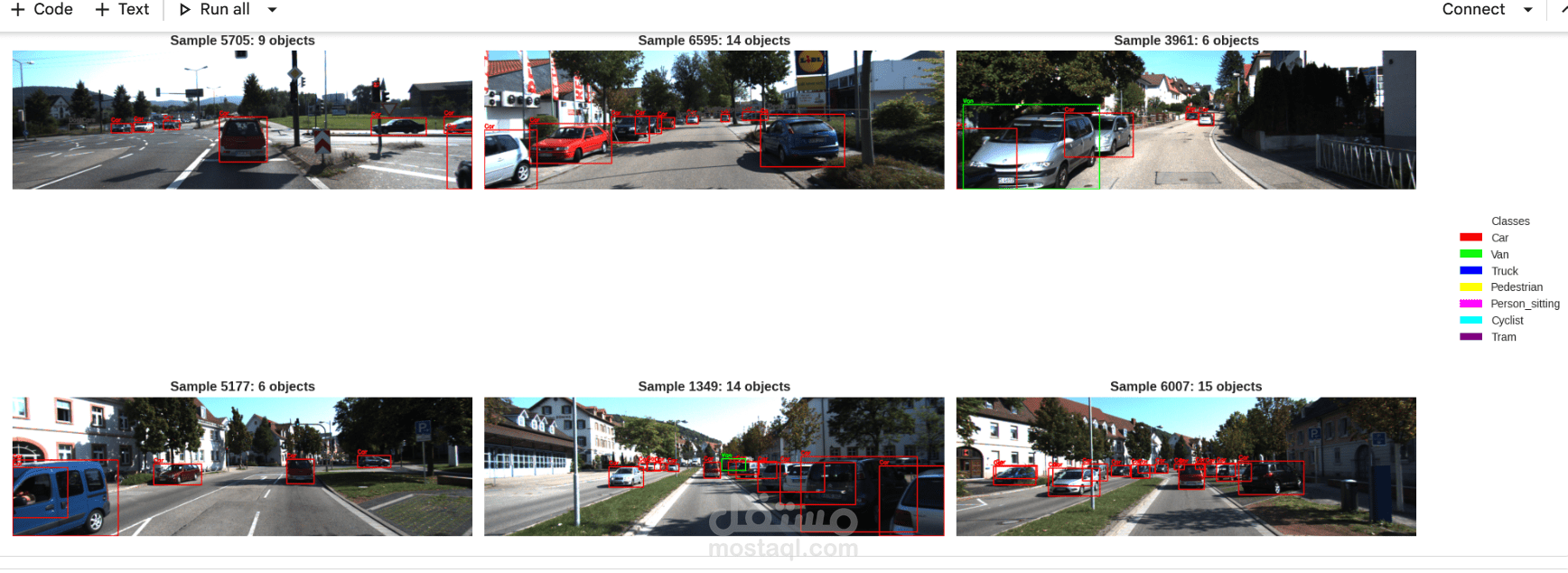
تحميل البيانات ومعالجتها باستخدام مجموعات بيانات مخصصة للمركبات الذاتية مثل KITTI وCOCO.
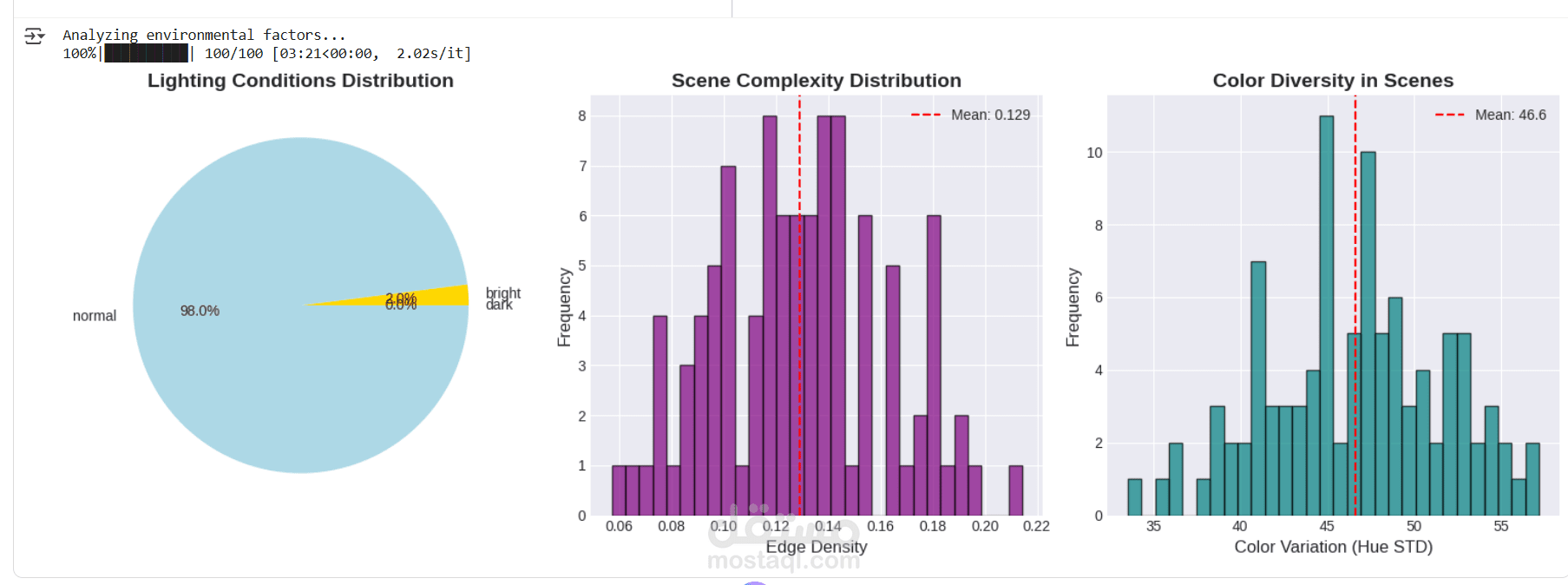
تحليل استكشافي للبيانات (EDA):
فحص التوزيع الإحصائي لفئات الكائنات (سيارات، مشاة، إشارات مرور).
تحليل جودة الصور ودقة التسميات (annotations).
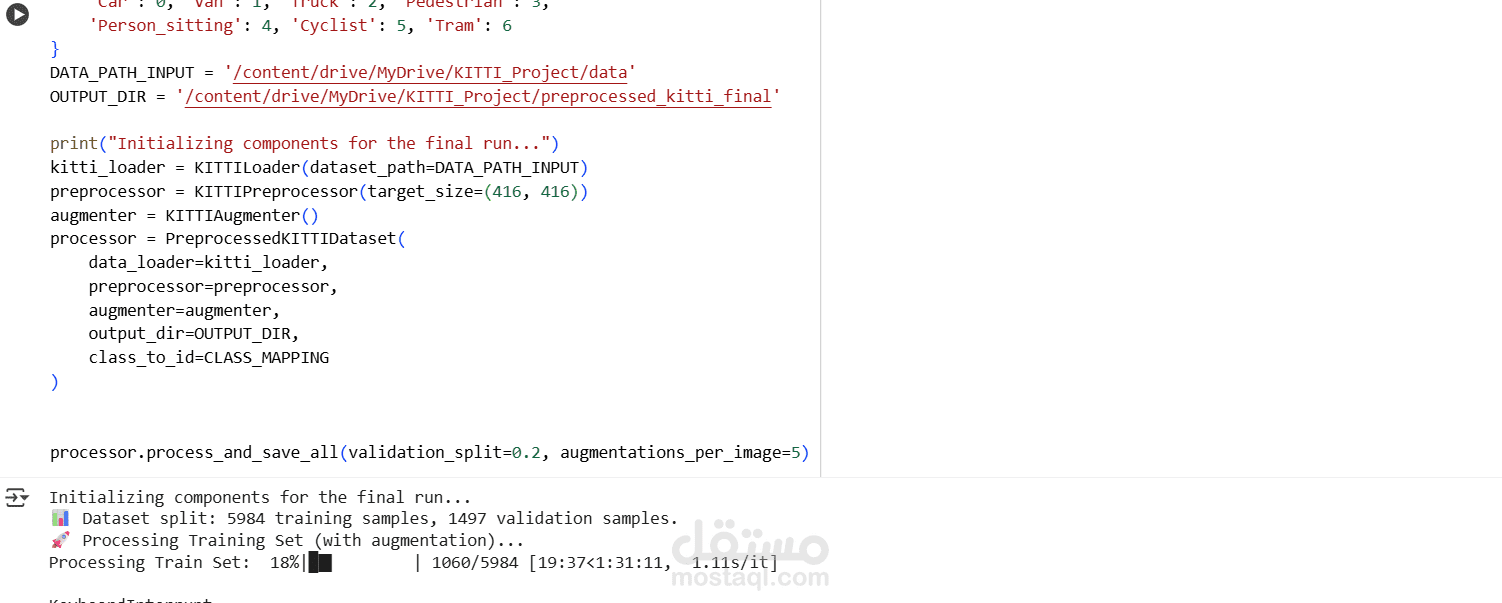
المعالجة المسبقة (Preprocessing):
تغيير حجم الصور إلى (416×416) لتناسب مدخلات YOLO.
التطبيع (Normalization) وتحويل القيم لتسريع التقارب أثناء التدريب.
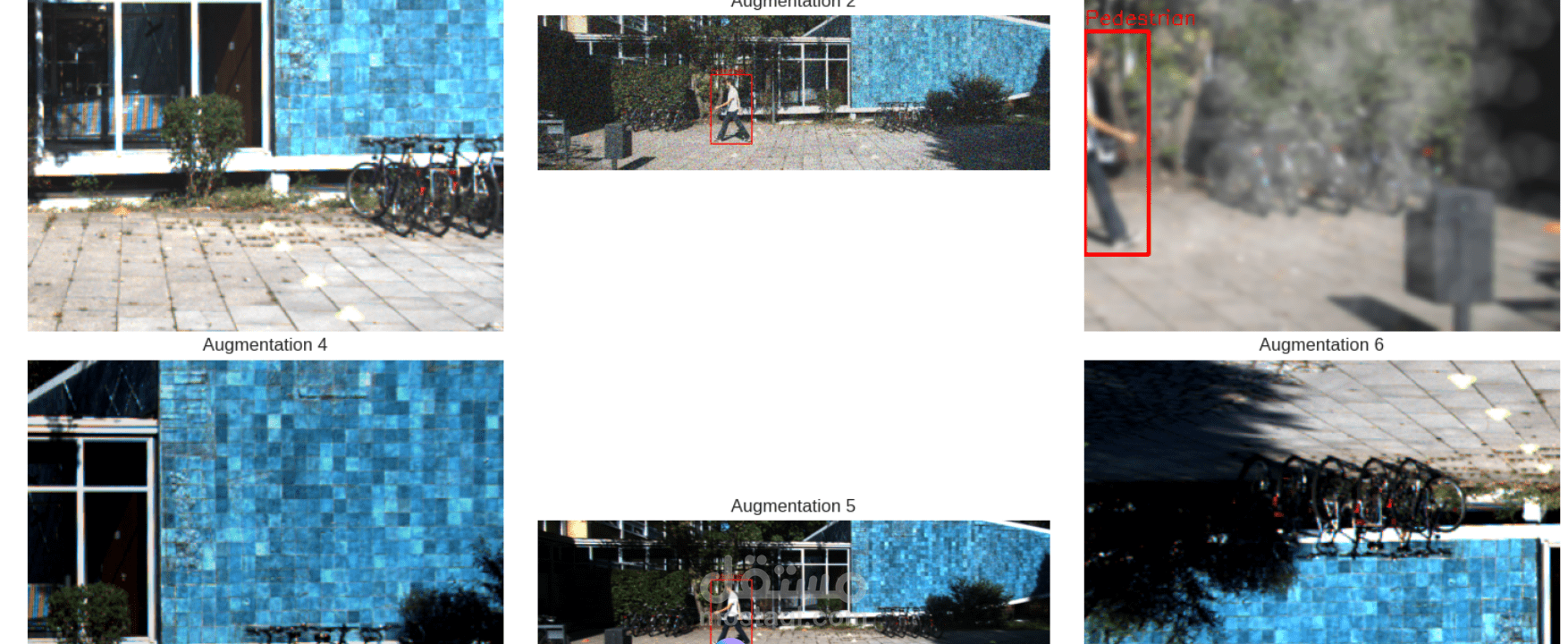
تطبيق تقنيات Augmentation (الانعكاس، التدوير، القصّ العشوائي) لمحاكاة ظروف القيادة المختلفة.
توثيق النتائج والتحضيرات الأولية للتدريب ضمن Notebook منظم وقابل للتوسّع.
In Progress (Team Work)
حاليًا يعمل الفريق على:
تطوير النماذج الأساسية (YOLOv8, SSD, Faster R-CNN) باستخدام Transfer Learning من بيانات COCO.
تقييم الأداء عبر مؤشرات (mAP, IoU, FPS) لقياس الدقة وسرعة التنفيذ.
نشر النموذج (Deployment) باستخدام TensorFlow Serving وONNX Runtime لتشغيله في الزمن الحقيقي.
بناء خط MLOps عبر أدوات مثل MLflow وKubeflow لمتابعة الأداء وإعادة التدريب التلقائي عند ظهور بيانات جديدة.
Tools & Technologies
Programming: Python
Frameworks: TensorFlow, PyTorch, Keras, OpenCV
Data Tools: Pandas, NumPy, Matplotlib, Seaborn
Deployment & Monitoring: TensorFlow Serving, ONNX, MLflow, Kubeflow
Collaboration: GitHub, Google Colab, OneDrive
Final Goal
بناء نظام متكامل لاكتشاف الأجسام في الزمن الحقيقي يعمل بكفاءة عالية في بيئات القيادة المختلفة (ليل/نهار، طقس ممطر، طرق مزدحمة).
يساعد هذا النظام في رفع مستوى السلامة والاعتمادية للسيارات ذاتية القيادة، ويُعدّ نموذجًا عمليًا لتطبيقات الذكاء الاصطناعي في المجال الصناعي.