(الذراع الروبوتية عن بُعد باستخدام الذكاء الاصطناعي والرؤية الحاسوبية)
تفاصيل العمل
لمشروع عبارة عن ذراع روبوتية يتم التحكم فيها عن بُعد باستخدام الذكاء الاصطناعي وتقنيات الرؤية الحاسوبية (Computer Vision).
الفكرة الأساسية هي إن الإنسان يقدر يحرك الروبوت بمجرد تحريك يده أمام الكاميرا، من غير ما يلمس أي ذراع تحكم أو جهاز.
آلية العمل:
الكاميرا بتقوم بتصوير حركة اليد في الوقت الحقيقي.
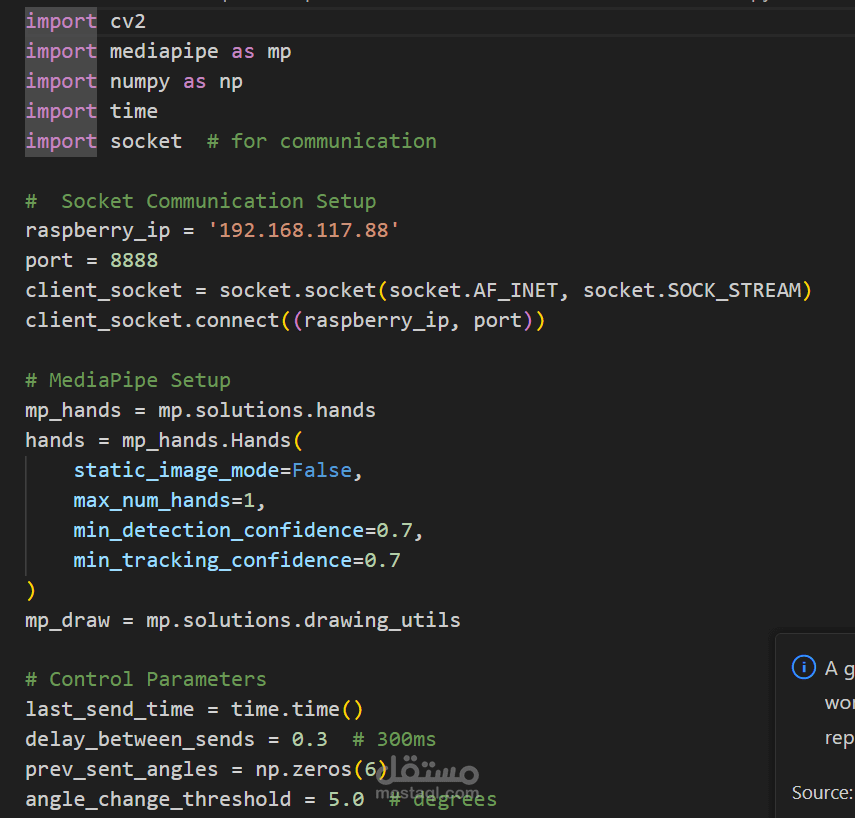
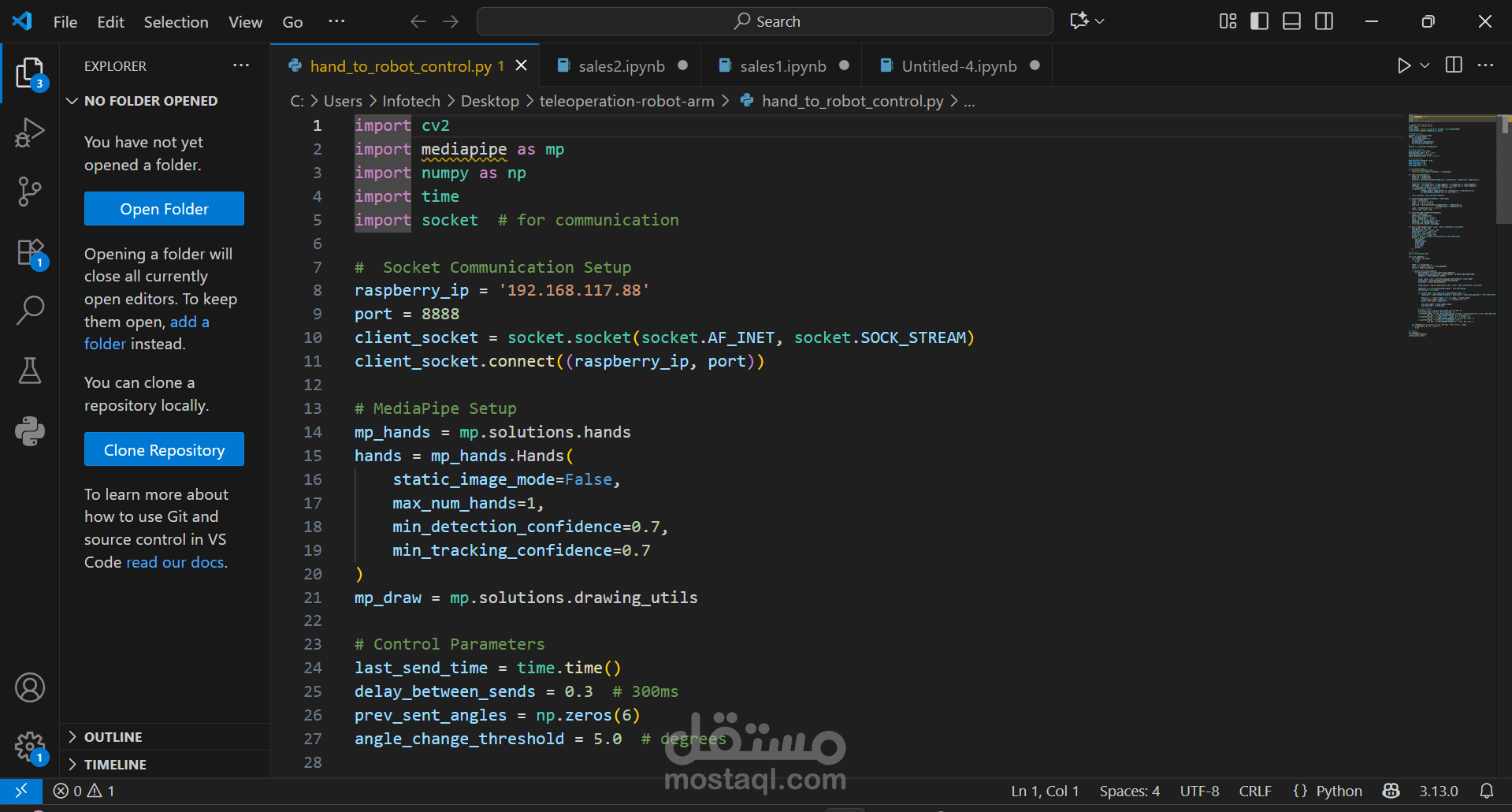
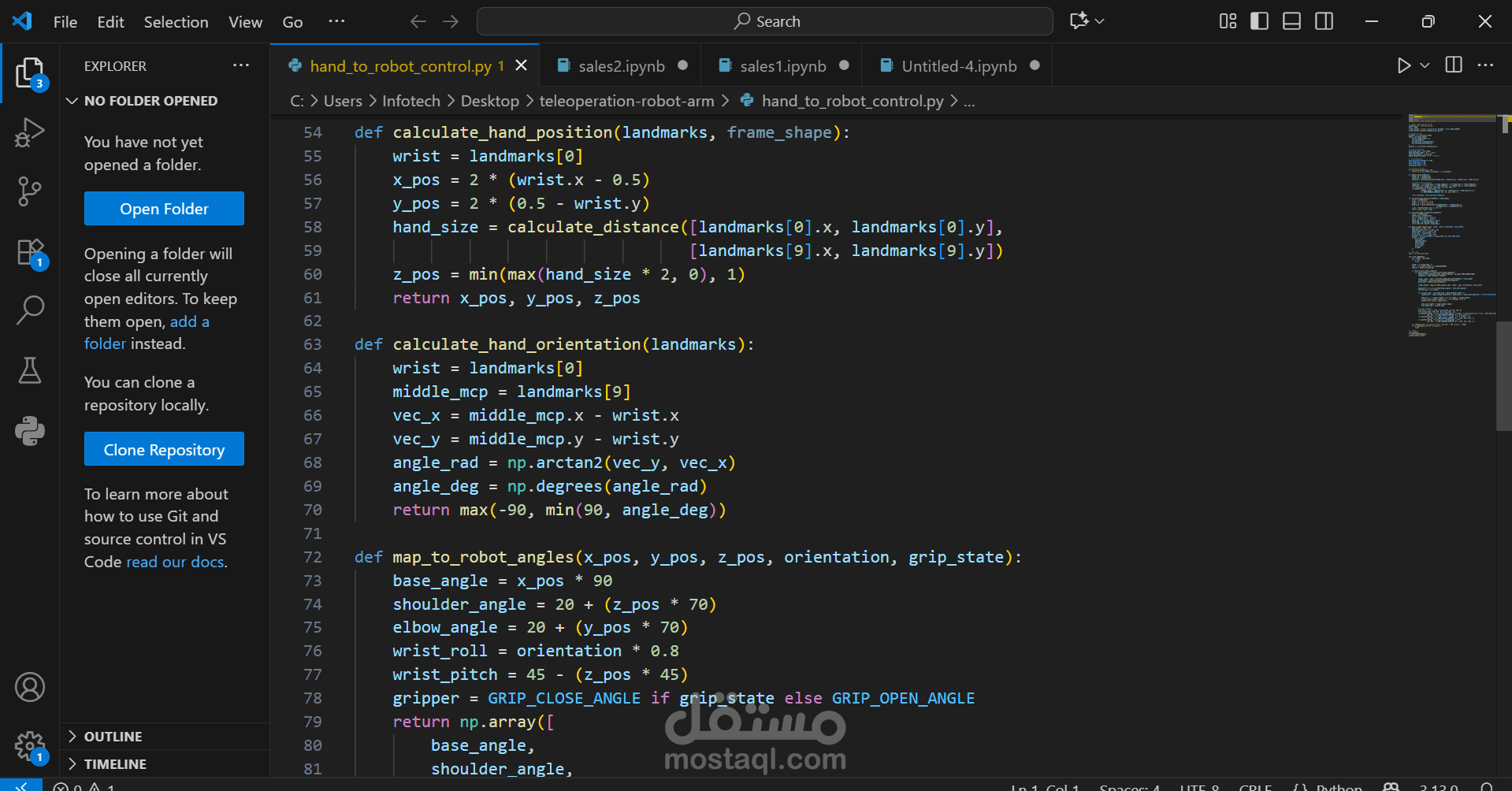
يتم استخدام خوارزميات الرؤية الحاسوبية (مثل Mediapipe) لاكتشاف مواضع مفاصل اليد وحساب الاتجاهات والزوايا.
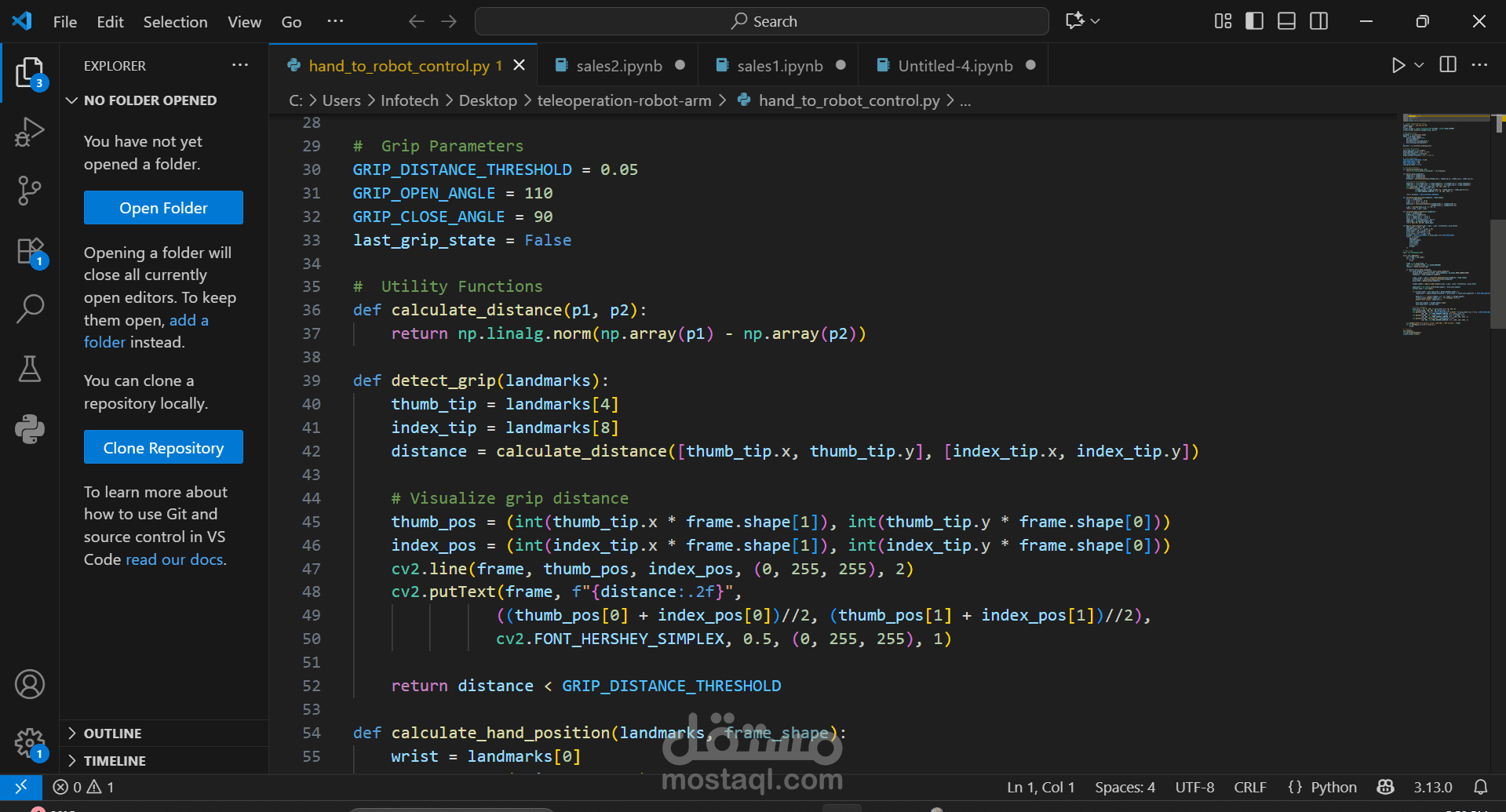
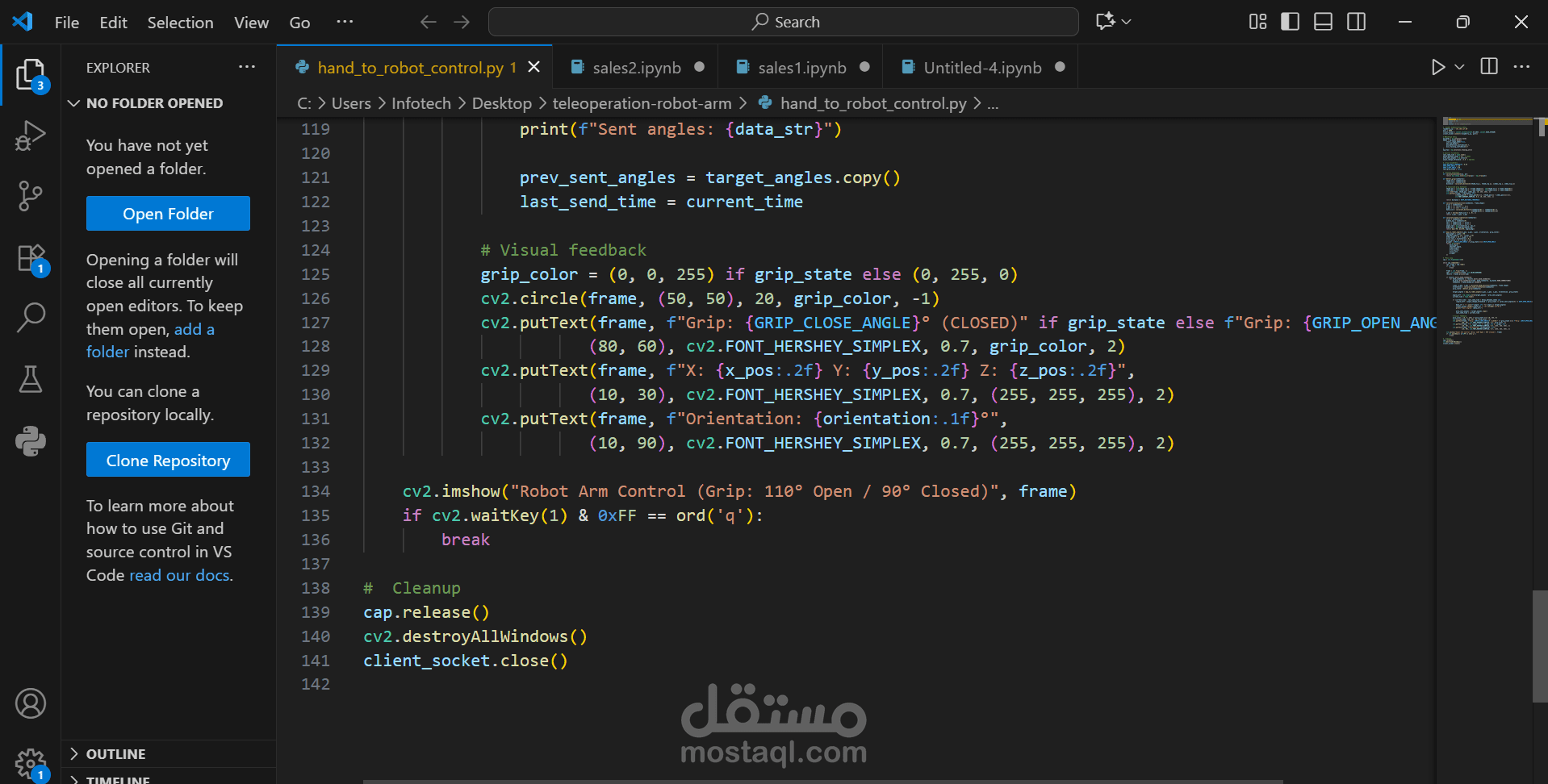
يتم تحليل الإشارات الناتجة لتحديد وضع اليد (مفتوحة – مغلقة) وحركة الأصابع والاتجاهات في الفراغ.
القيم الناتجة (مثل الزوايا أو إحداثيات الحركة) يتم إرسالها إلى وحدة التحكم الخاصة بالروبوت عبر ROS (Robot Operating System) أو Wi-Fi.
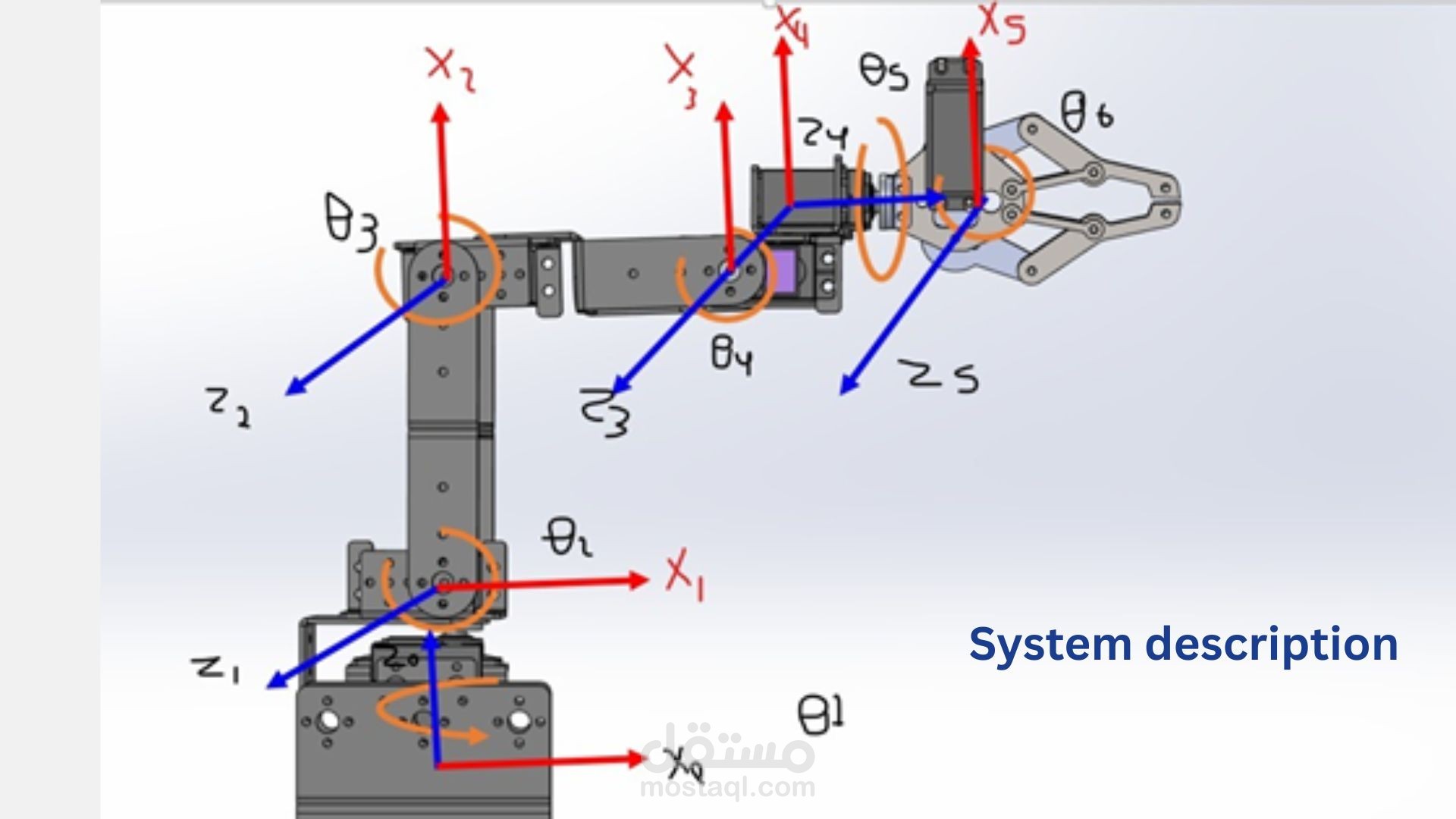
الذراع الروبوتية (المكونة من 5 درجات حرية + Gripper) تتحرك بنفس اتجاه حركة اليد البشرية بشكل لحظي. تم تدريب نموذج الذكاء الاصطناعي على التعرف على إيماءات اليد وتحليلها بشكل دقيق.
الجزء الخاص بـ AI يتعامل مع معالجة الصور، واستخلاص الـ landmarks، وتحليل الإشارات لتحديد الحركة المطلوبة.
هذا الجزء ممكن تشغيله بشكل مستقل عن الـ ROS (وده اللي تقدر ترفعيه في GitHub كـ demo للـ AI فقط).