humaniod robot
تفاصيل العمل
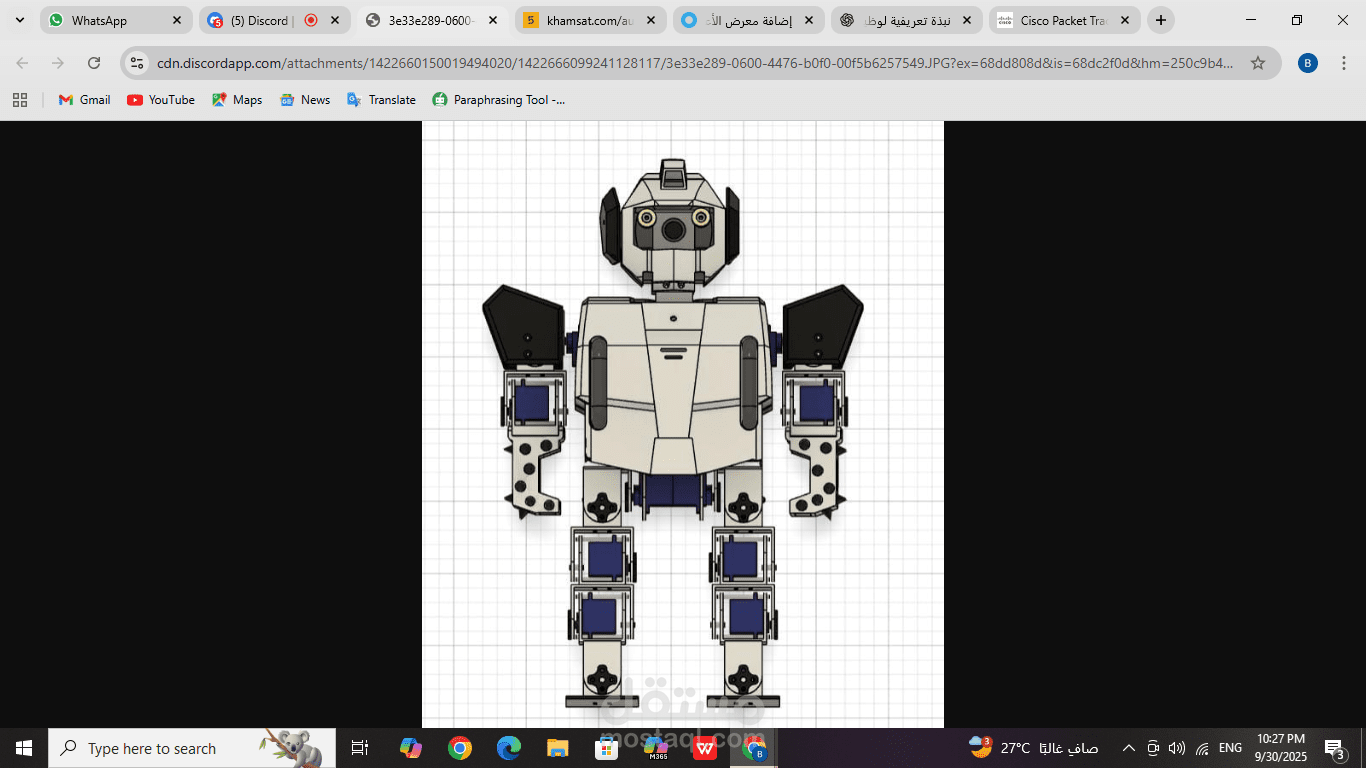
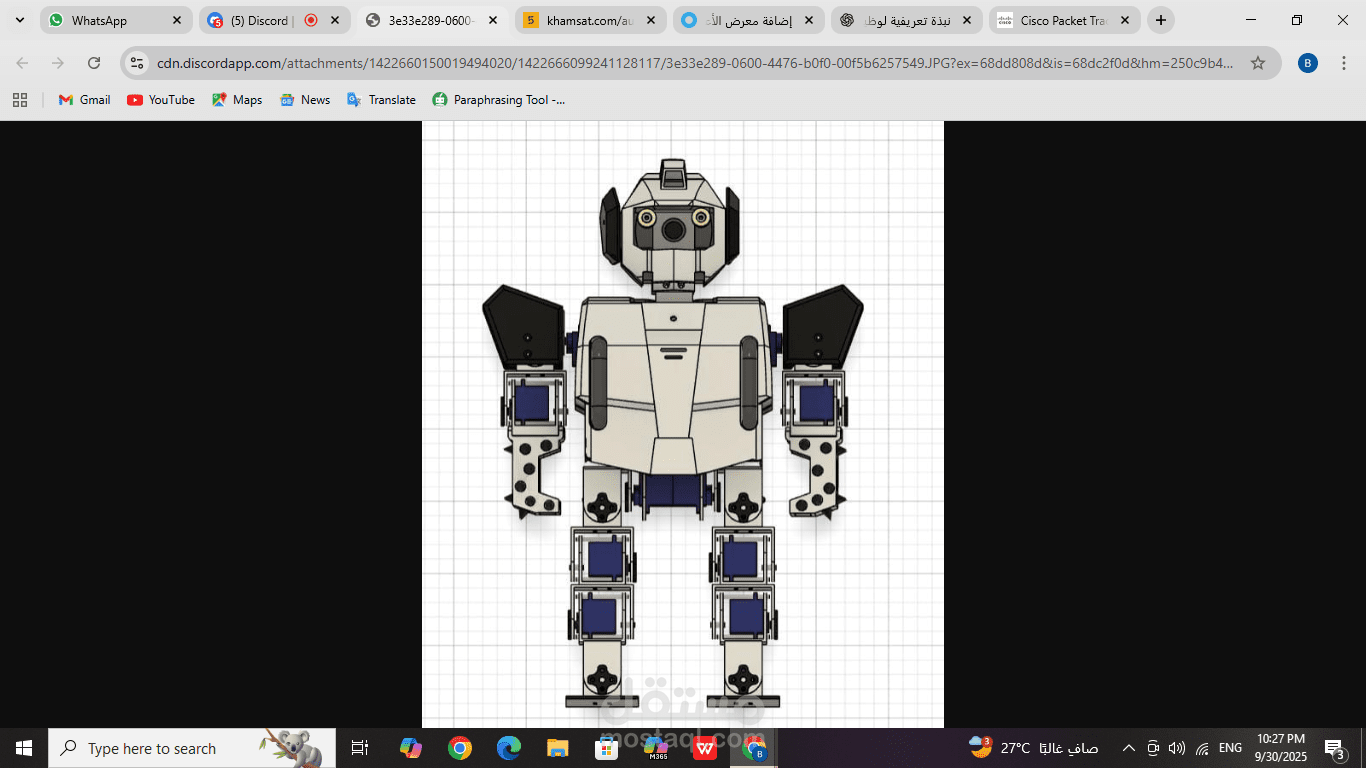
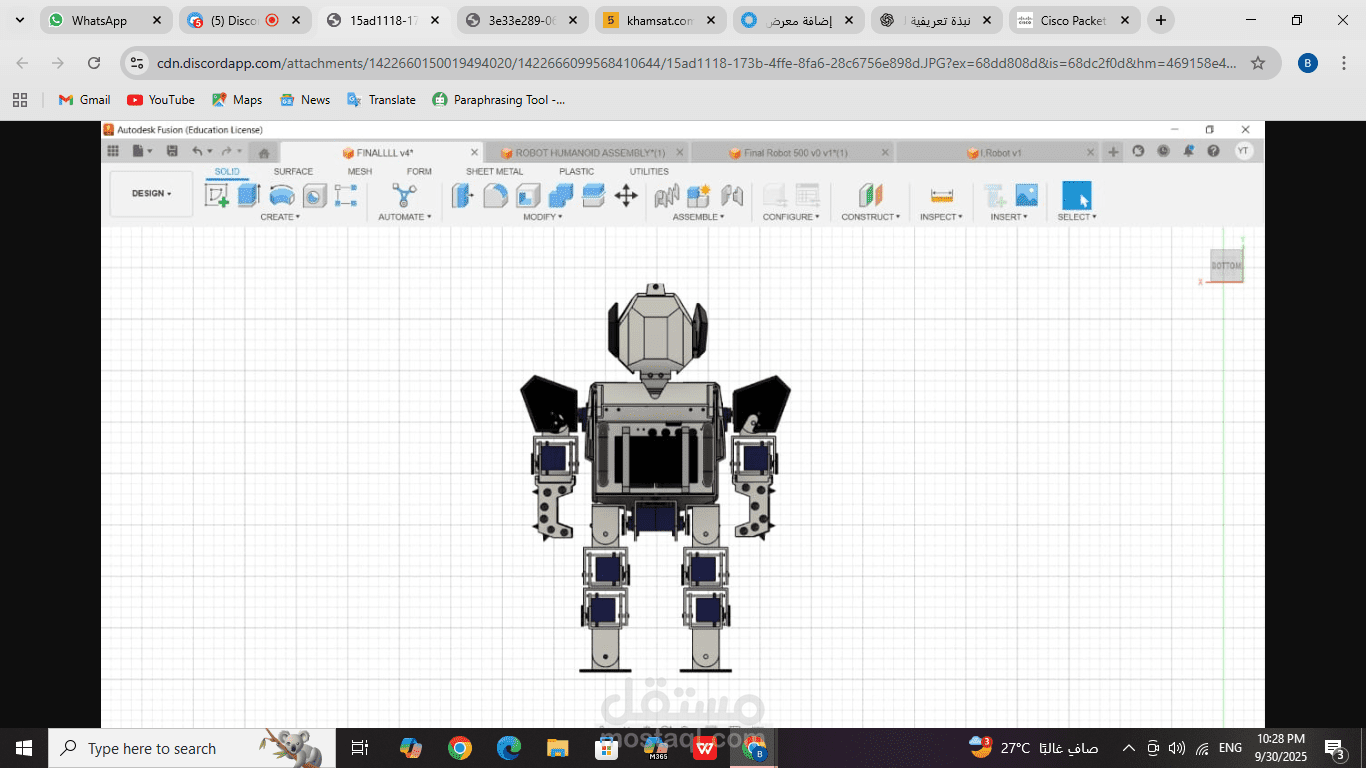
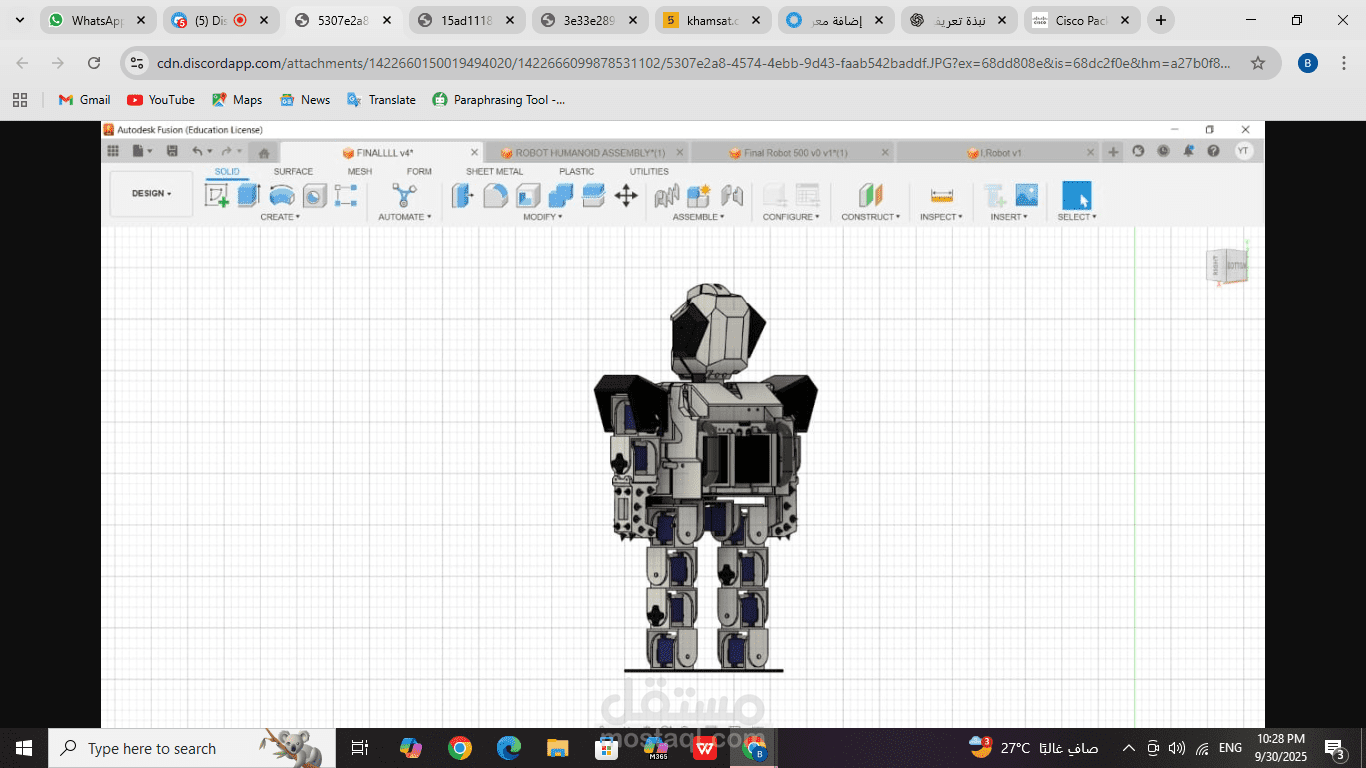
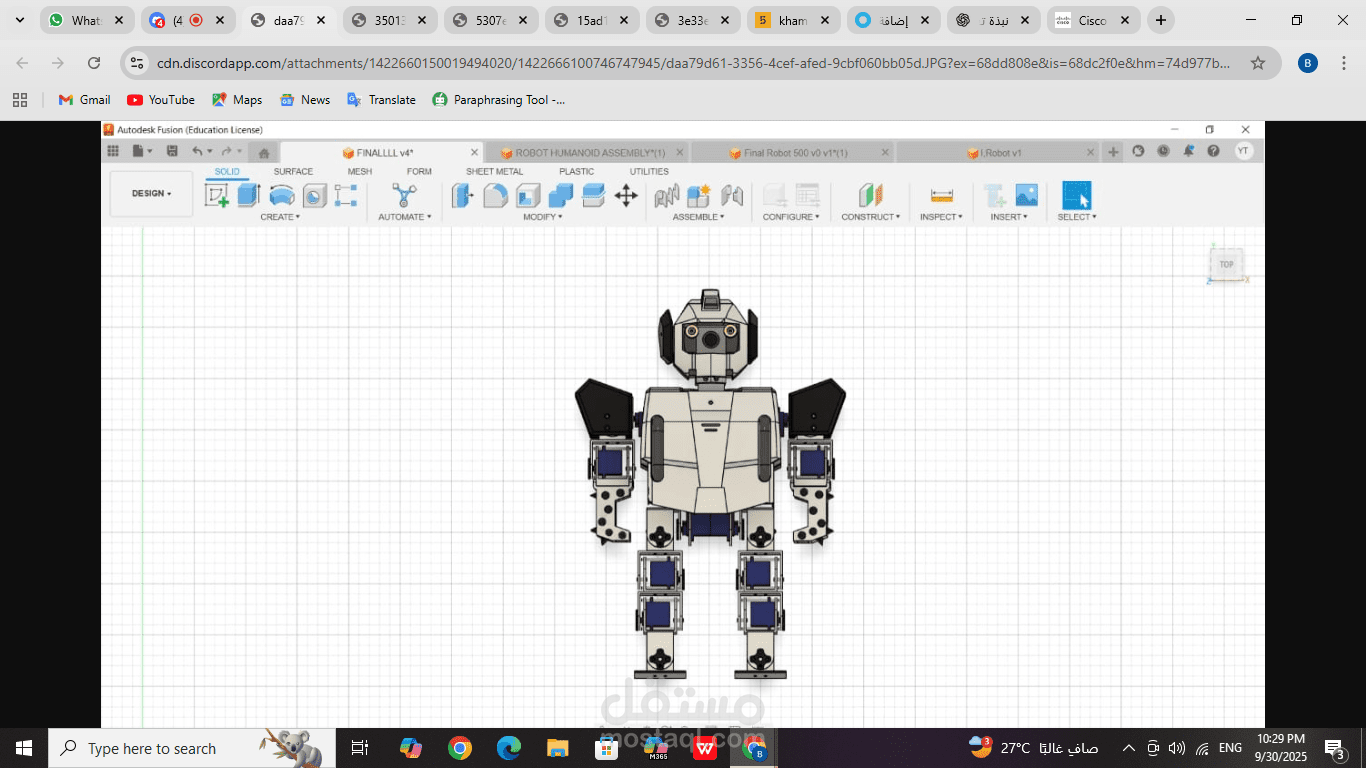
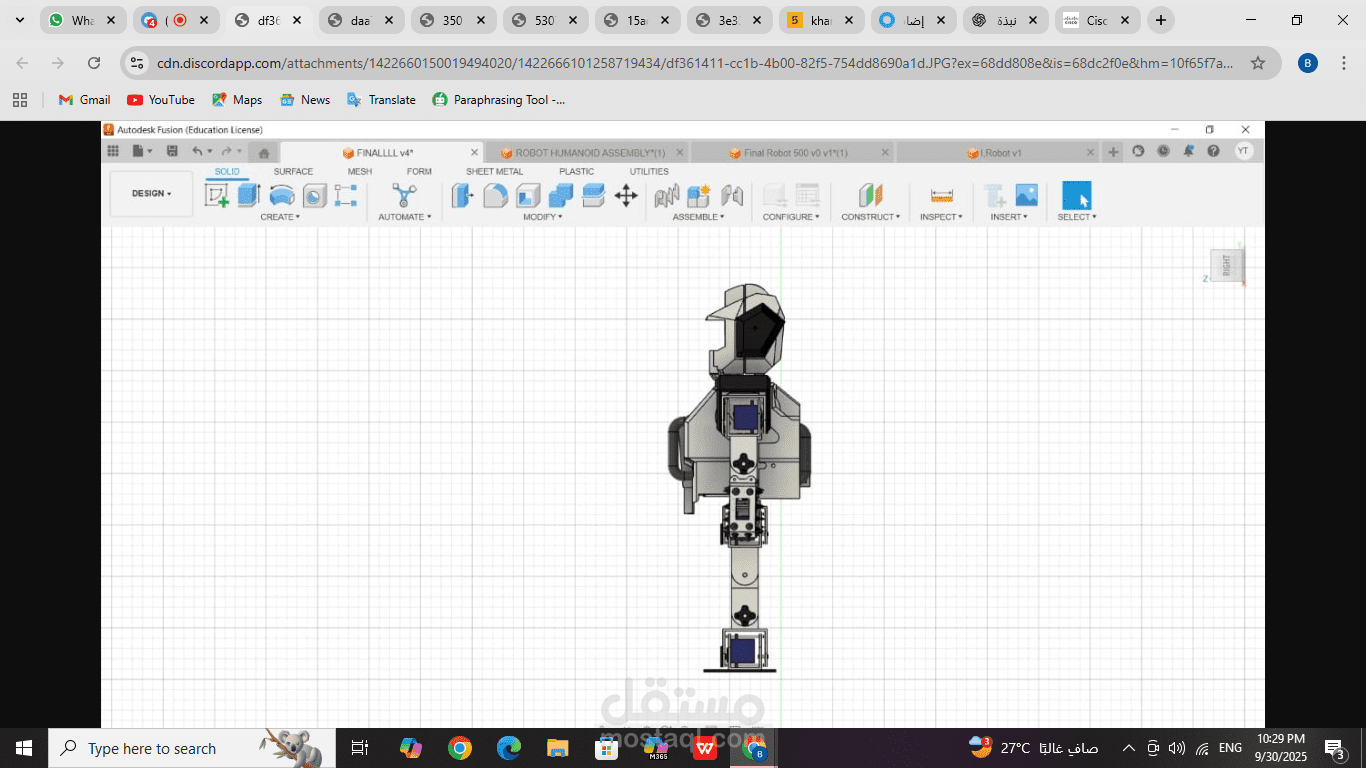
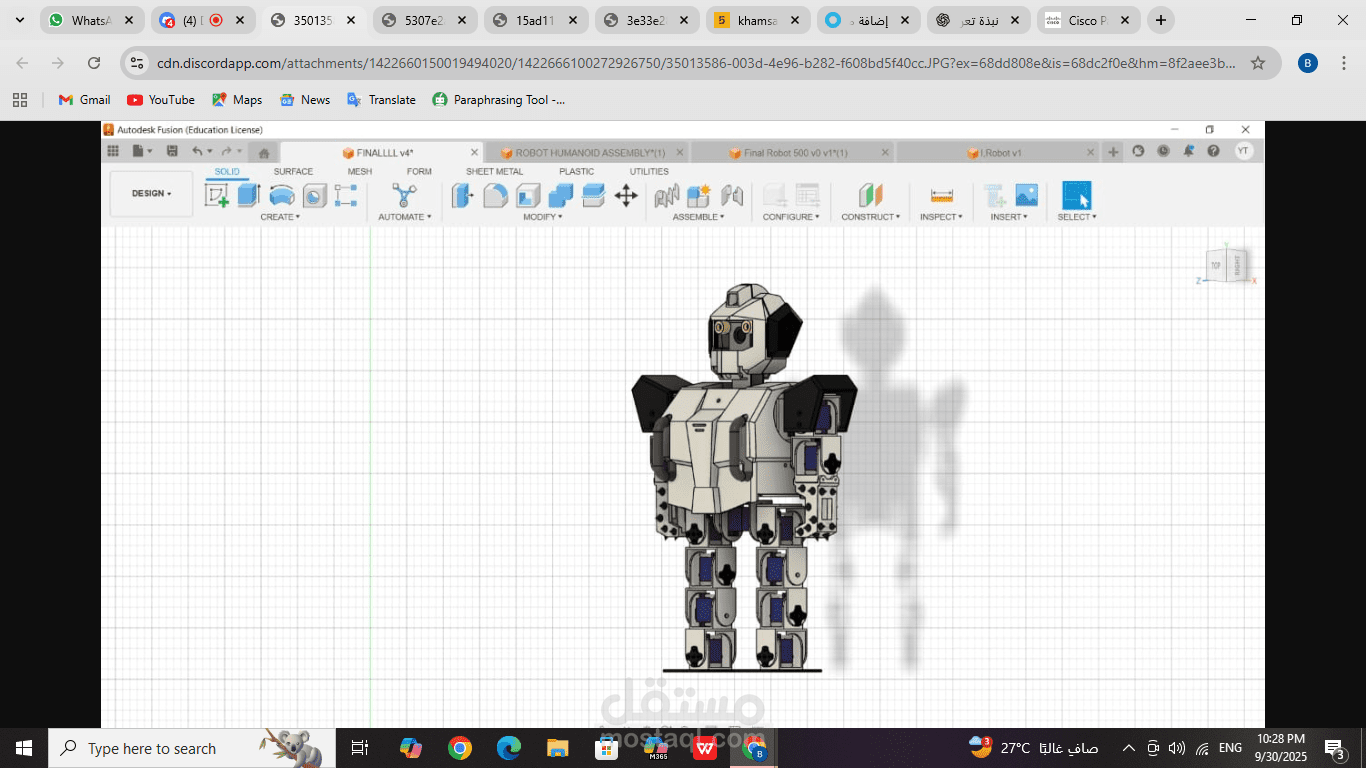
To design, build, and program a humanoid robot that replicates human-like motion, perception, and interaction by integrating mechanical design, sensors, actuators, and artificial intelligence. The project aims to create a versatile platform capable of performing daily tasks, recognizing and responding to voice or visual commands, and interacting naturally with users. Emphasis will be placed on balance, mobility, and dexterity to enable walking, object handling, and gesture imitation. The system will incorporate advanced control algorithms, real-time data processing, and safety mechanisms to ensure reliable operation. Ultimately, this humanoid robot will serve as both a research and practical tool, showcasing the potential of robotics in education, healthcare, assistance, and human–machine collaboration.