yolo object detection
تفاصيل العمل
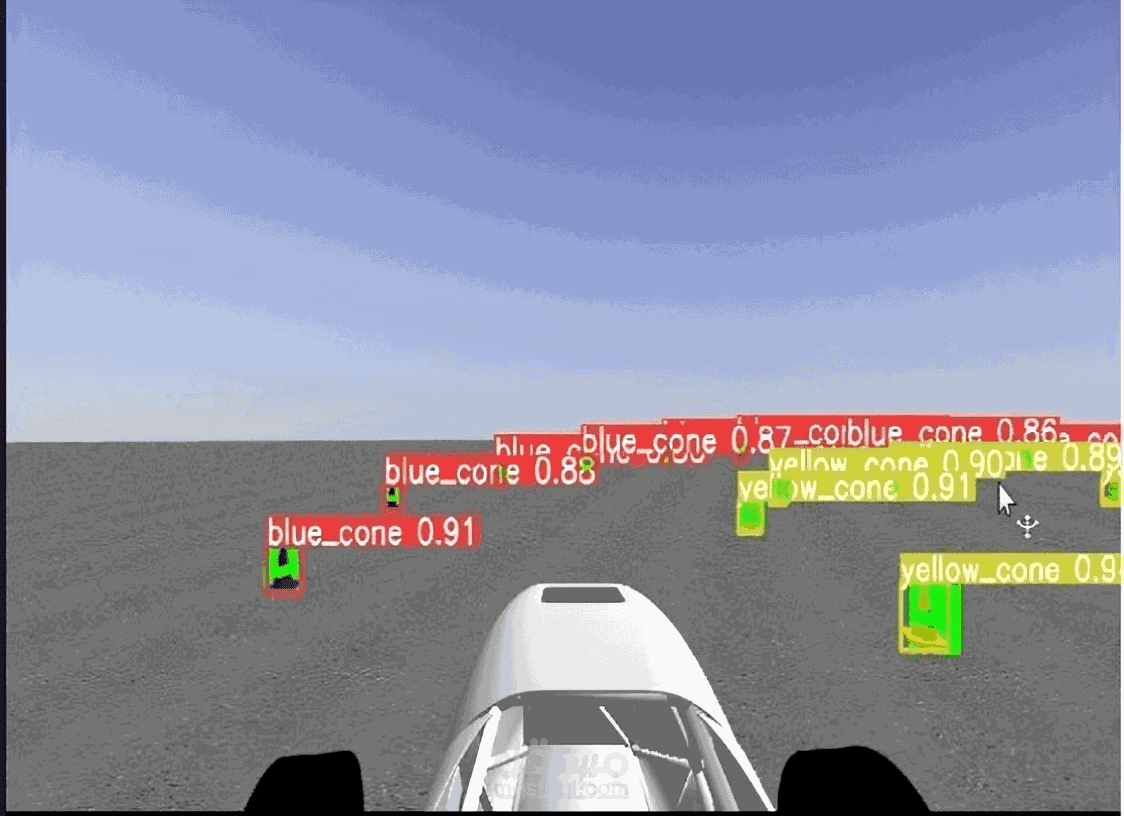
In the Formula Student autonomous project, I implemented YOLO (You Only Look Once) object detection to identify track cones in real time.
Objective: Enable the car to detect and classify traffic cones (usually yellow, blue, and orange) that define the race track.
Method:
Collected and labeled a custom dataset of cone images under varying conditions (lighting, angles, backgrounds).
Trained a YOLOv8-s model for real-time cone detection with high accuracy.
Optimized inference for low-latency performance, ensuring the model could run at real-time speeds on embedded hardware.
Impact: The cone detection system became a critical component for the car’s perception pipeline, feeding cone positions into the localization and path-planning algorithms. This allowed the car to understand the track boundaries and drive autonomously.