سيارة ذاتية القيادة باستخدام الرؤية الحاسوبية
تفاصيل العمل
هذا المشروع كان أحد أهم وأكبر إنجازاتي الأكاديمية، حيث عملت على تصميم وتطوير نظام قيادة ذاتية يعتمد على تقنيات الرؤية الحاسوبية والذكاء الاصطناعي.
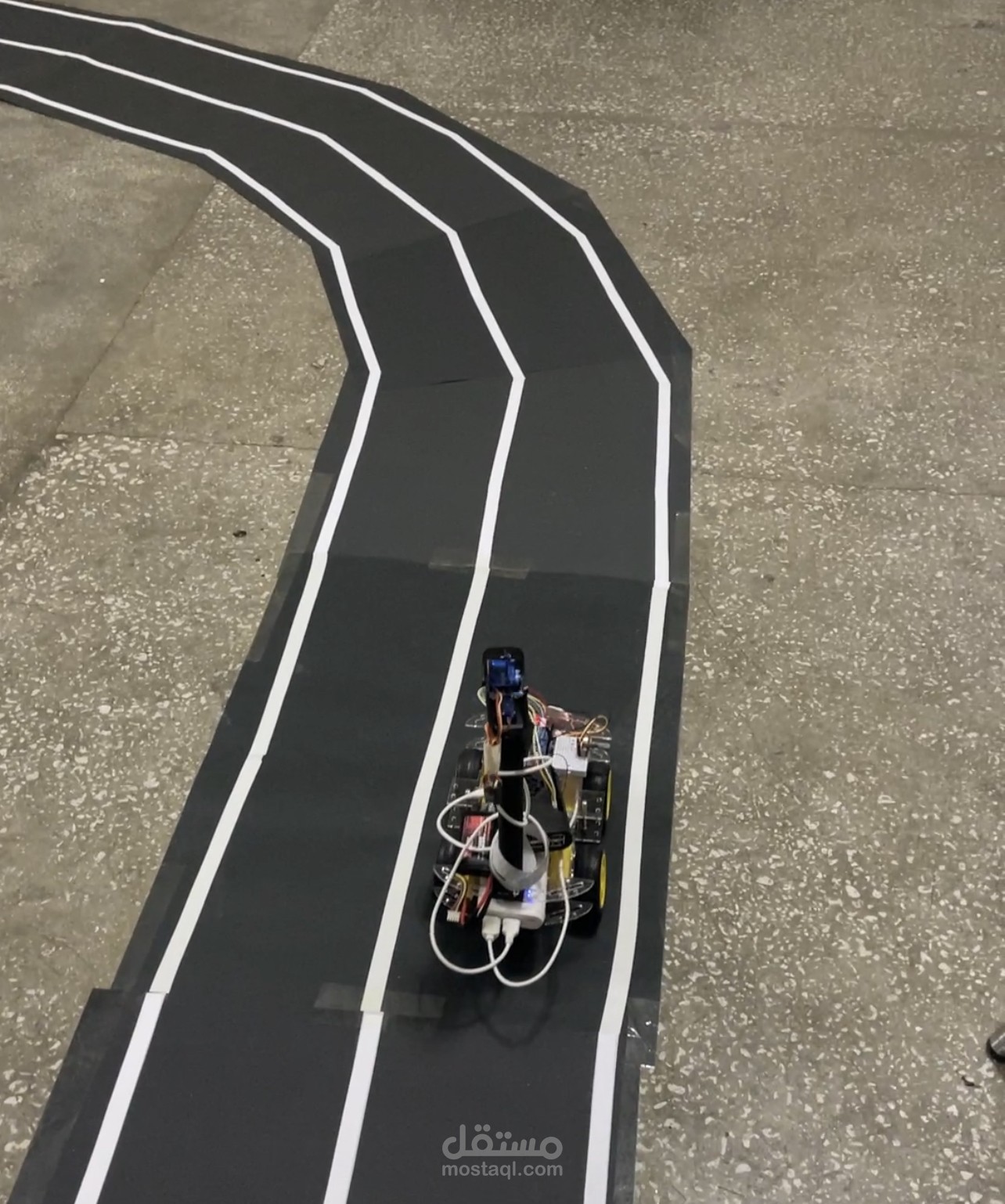
الفكرة: إنشاء نموذج مصغر لسيارة قادرة على الحركة بشكل مستقل، معتمدة على كاميرا وأجهزة استشعار لمعالجة البيئة المحيطة واتخاذ القرارات بشكل آني.
الأهداف:
محاكاة أنظمة القيادة الذاتية الحديثة.
استخدام تقنيات الذكاء الاصطناعي والرؤية الحاسوبية للتعرف على المسارات والعوائق.
تطوير نموذج أولي قابل للتوسع نحو تطبيقات صناعية مستقبلية.
التقنيات المستخدمة:
Python ولغات برمجة داعمة مثل C++.
مكتبات OpenCV لمعالجة الصور والفيديو.
خوارزميات Machine Learning (مثل Haar Cascade و YOLO للتعرف على الأشياء).
معالجات دقيقة (مثل Raspberry Pi) للتحكم بالسيارة.
آلية العمل:
التقاط الفيديو من الكاميرا الأمامية.
معالجة الصور لاستخراج المسارات والخطوط (Lane Detection).
استخدام خوارزميات لتفادي العوائق والتوقف عند الإشارات.
إرسال أوامر مباشرة للمحركات للتحكم بحركة السيارة.
النتائج:
تم تنفيذ سيارة قادرة على تتبع المسار بدقة.
إمكانية التوقف التلقائي عند العوائق.
تجربة ناجحة لدمج الذكاء الاصطناعي مع الأنظمة الميكاترونية في مشروع متكامل.