Ball Balancing Robot with Sense Plate
تفاصيل العمل
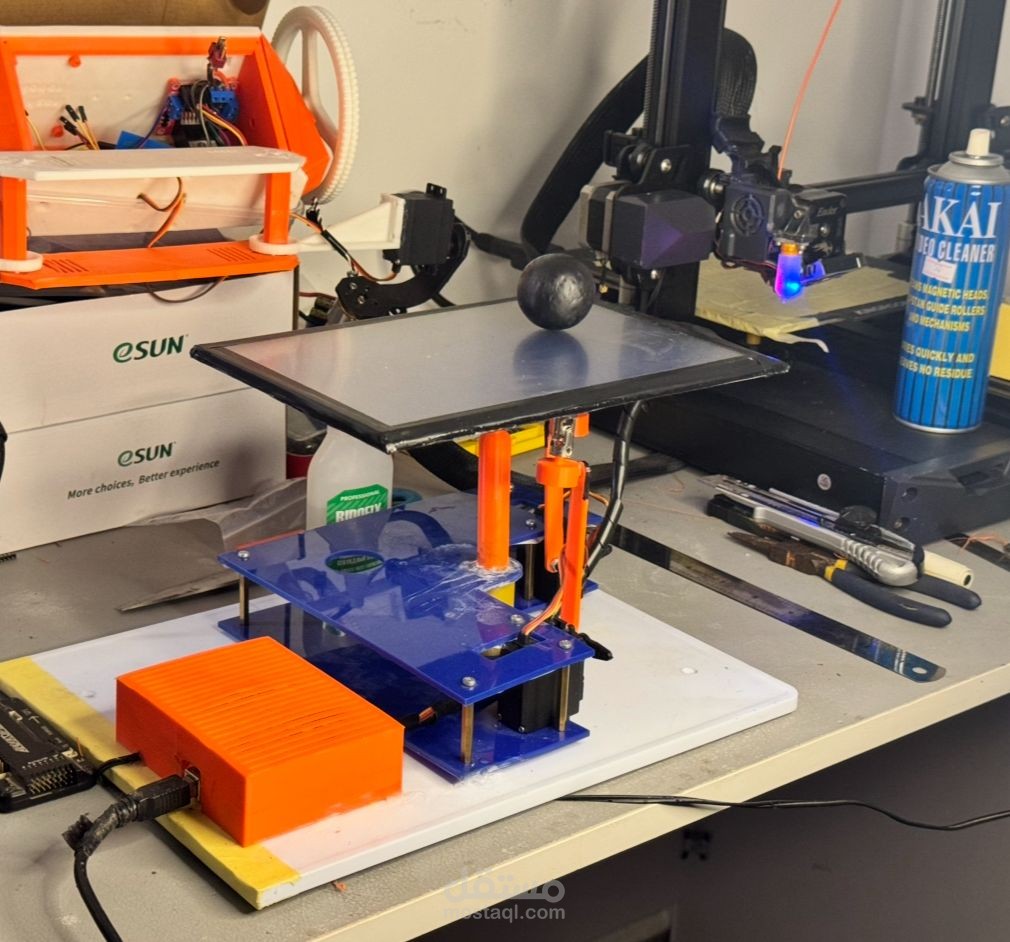
A DIY project to build a simple yet powerful ball-balancing robot using an Arduino, two servo motors, and a sense plate. The system keeps a ball centered on a flat surface by tilting the plate in two directions based on sensor feedback — an excellent demonstration of real-time control systems and PID loops.