نظام تحكم لمسار دائري في ذراع روبوتية 5-DOF
تفاصيل العمل
قمت بتنفيذ مشروع في أنظمة التحكم والروبوتات لتصميم وتنفيذ حركة مسار دائري لذراع روبوتي بدرجة حرية 5-DOF.
بدأت بإنشاء نموذج الذراع في MATLAB Simulink (Simscape)، ثم طورت سكربت في MATLAB لحل المعادلات العكسية للحركة (Inverse Kinematics) وحساب المسار المطلوب للنقطة النهائية (End-Effector).
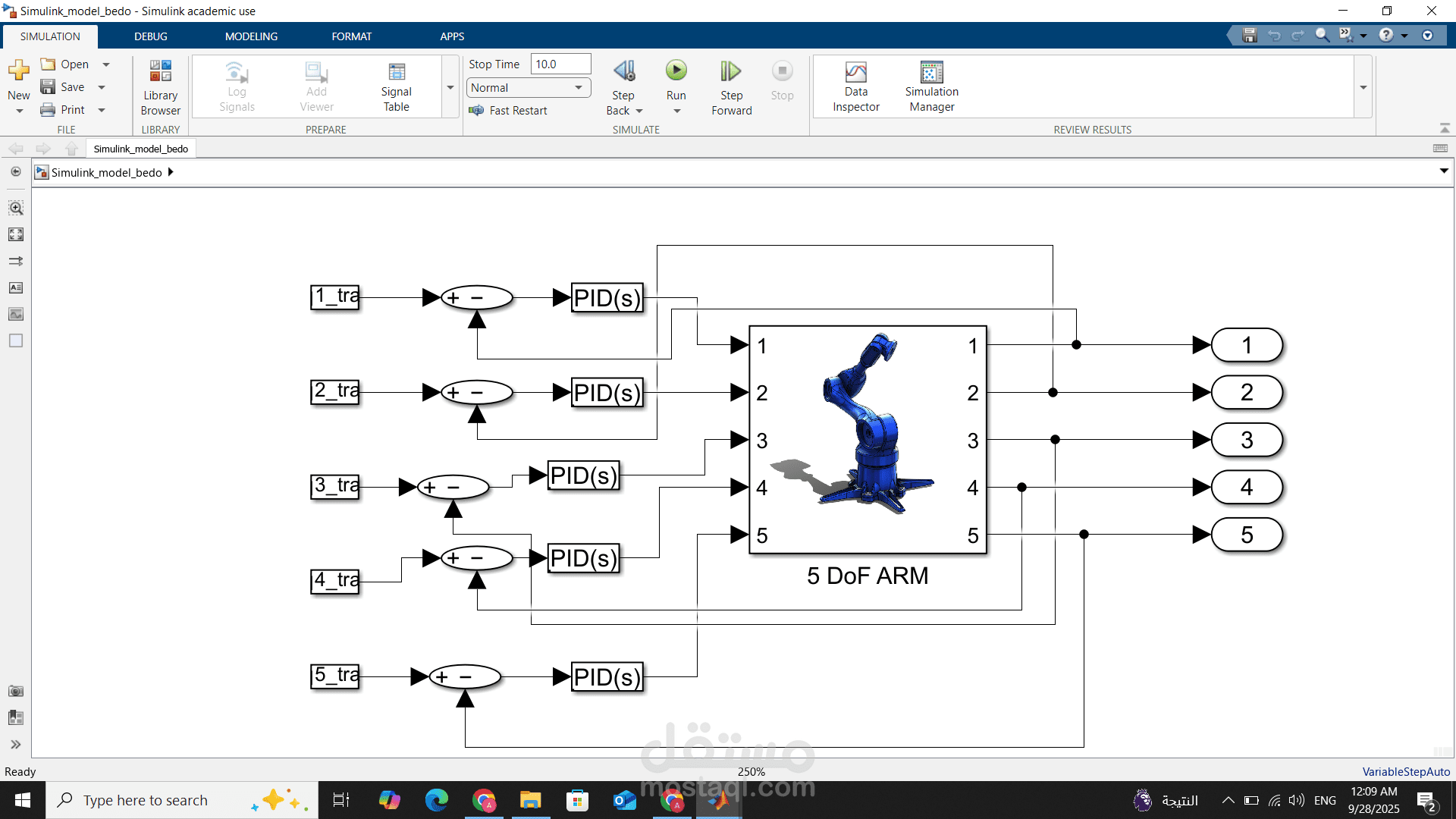
بعد ذلك، قمت بتوليد المسار الدائري وتخزين الزوايا الخاصة بالمفاصل الخمسة. هذه الزوايا تم إرسالها مع تغذية راجعة (Feedback) من المفاصل إلى نظام تحكم PID قمت بتصميمه، وذلك لضمان إرسال الزوايا الصحيحة والتحكم بدقة في حركة الذراع.
النتيجة كانت ذراع روبوتية قادرة على تنفيذ مسار دائري سلس ودقيق باستخدام التحكم PID مع تكامل كامل بين النمذجة والمحاكاة في MATLAB/Simulink.