روبوت ثلاثي درجات الحرية
تفاصيل العمل
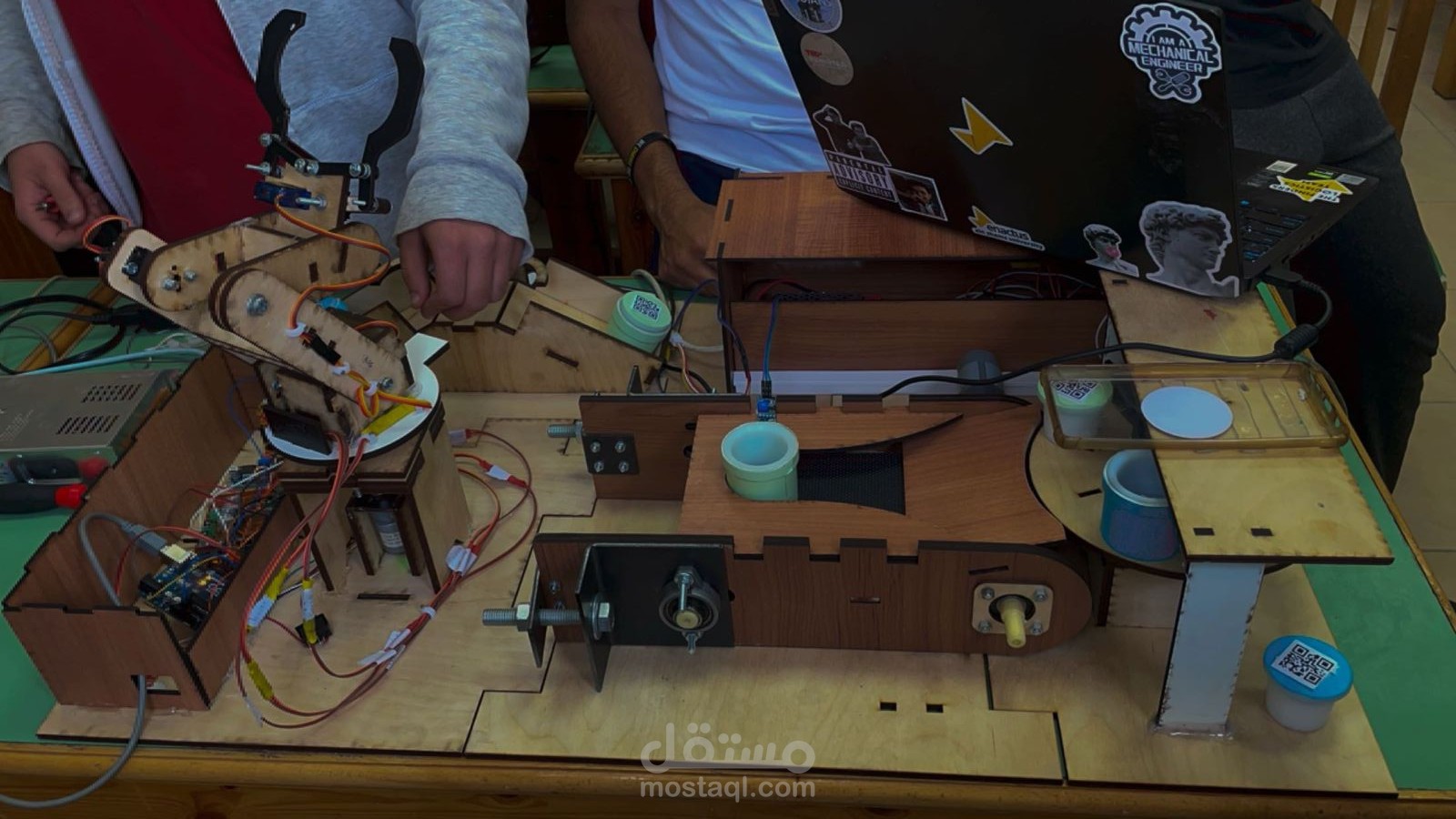
قمت بتصميم وتنفيذ روبوت تجميع آلي بثلاث درجات حرية قادر على القيام بمهام الالتقاط والوضع (Pick & Place) بدقة وكفاءة. يعتمد الروبوت على خوارزمية تحكم PID لضمان حركة سلسة ومستقرة، مما يتيح له التعامل مع المكونات في خط إنتاج صغير.
تم دمج الروبوت ضمن نظام ميكاتروني متكامل يشمل وحدة فرز، ناقل حركة (Conveyor)، وآلية اتصال UART للتكامل مع باقي وحدات النظام. يهدف المشروع إلى أتمتة عمليات التجميع البسيطة وتقليل التدخل البشري، مما يساهم في رفع الكفاءة وتقليل الأخطاء في خطوط الإنتاج صغيرة النطاق.