مصمم واجهات في MATLAB
تفاصيل العمل

صميم وتطوير واجهة رسومية تفاعلية في MATLAB GUI لربط المستخدم بالروبوت الذكي.
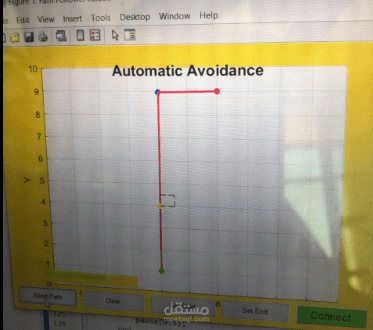
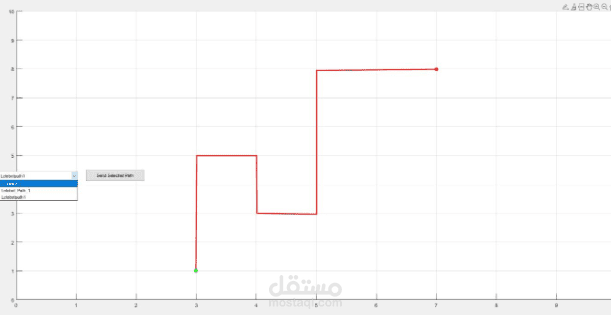
تمكين المستخدم من رسم المسار الذي يجب أن يتبعه الروبوت على الواجهة.
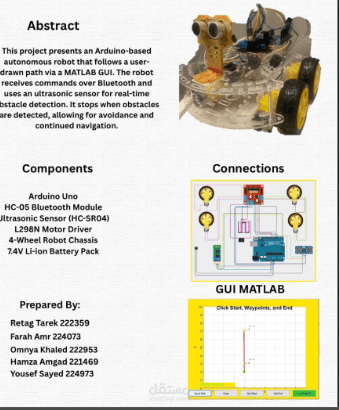
إرسال أوامر الحركة (F, B, L, R, S) إلى الروبوت عبر Bluetooth (HC-05) بشكل آني.
استقبال إشعارات من الروبوت عند اكتشاف عوائق باستخدام المستشعر فوق الصوتي (HC-SR04).
تنفيذ بروتوكول تجنب العقبات داخل GUI بشكل تلقائي وإعادة الروبوت إلى المسار الأصلي.
إضافة ميزات مثل:
حفظ المسارات المرسومة.
إعادة تشغيل المسارات (Replay).
عرض حيّ لمسار الروبوت وحالاته