RC Car with Autonomous Control
تفاصيل العمل
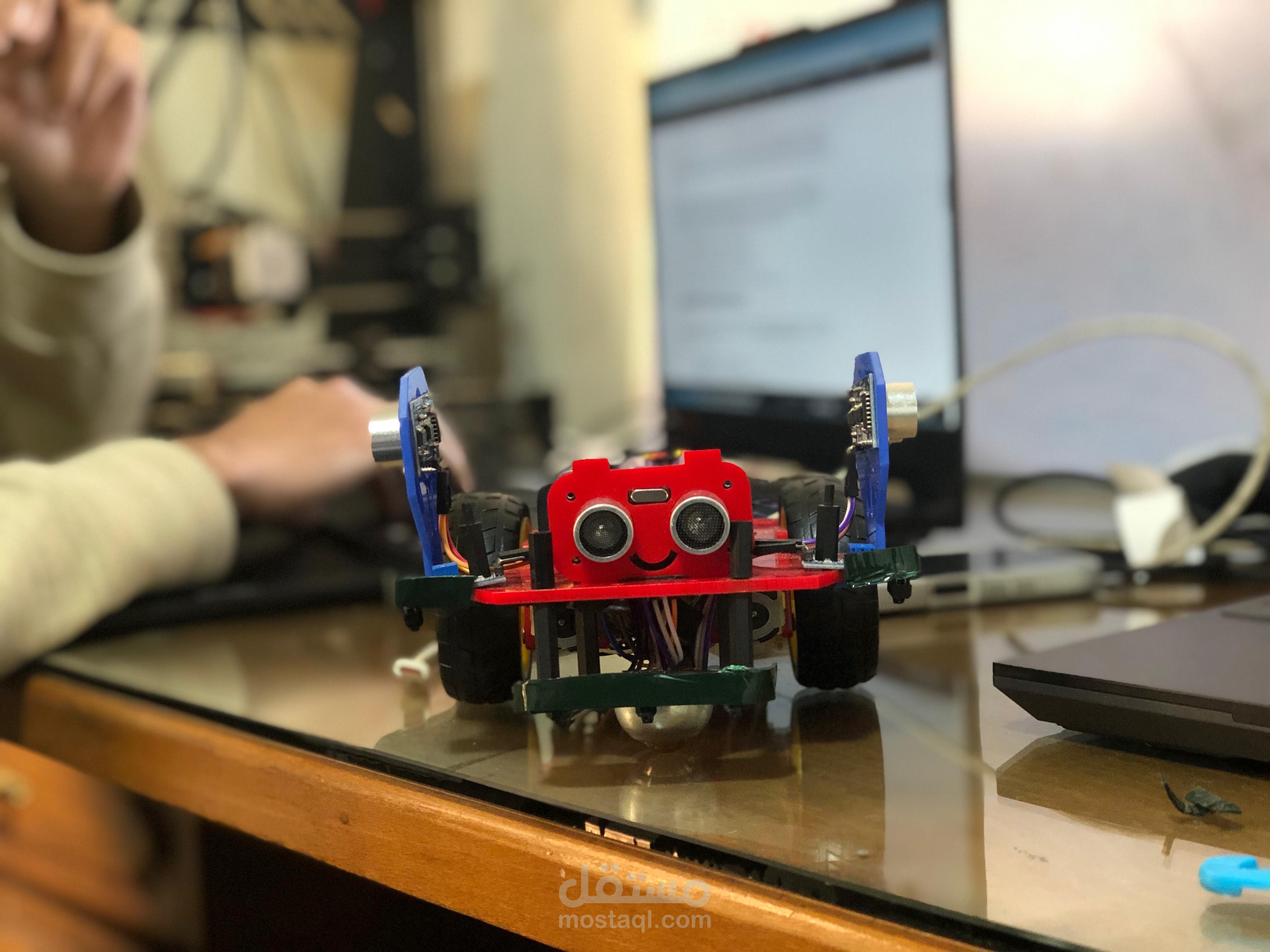
Designed and constructed a physical RC car and integrated hardware and software to build an
intelligent physical system. The project involved programming multiple autonomous functionalities, including
remote control, line following, and maze solving. This was achieved using 5 IR and 5 ultrasonic sensors.