الروبوت الذكي
تفاصيل العمل
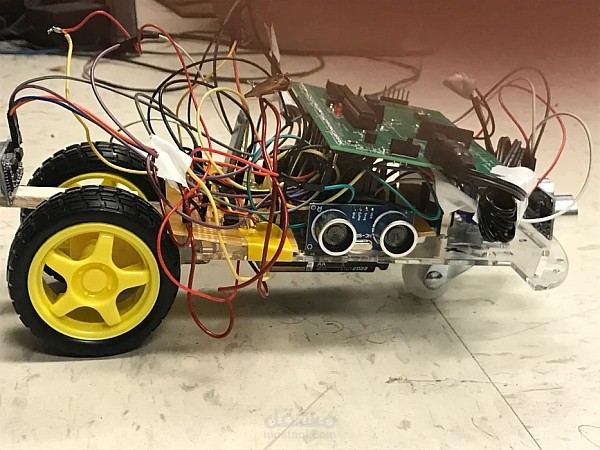
تم تصميم وتطوير روبوت سيارة صغيرة باستخدام أنظمة مدمجة مع وحدة Arduino Uno للتحكم في الحركة عبر محركات DC مع دائرة قيادة L298N Motor Driver. تمت برمجة الروبوت بلغة Arduino C على Arduino IDE لعمل أنماط حركة مختلفة (Forward, Reverse, Rotation). كما أضفت خوارزميات لتفادي العقبات باستخدام Ultrasonic Sensor (HC-SR04)، مع إمكانية تطويره ليعمل بالتحكم عن بعد أو لأداء مهام تنقل محددة مسبقًا. التصميم الميكانيكي للهيكل تمت دراسته مبدئيًا على SolidWorks، والدوائر الإلكترونية تمت محاكاتها باستخدام Proteus.