SmartCar Using CV and NLP
تفاصيل العمل
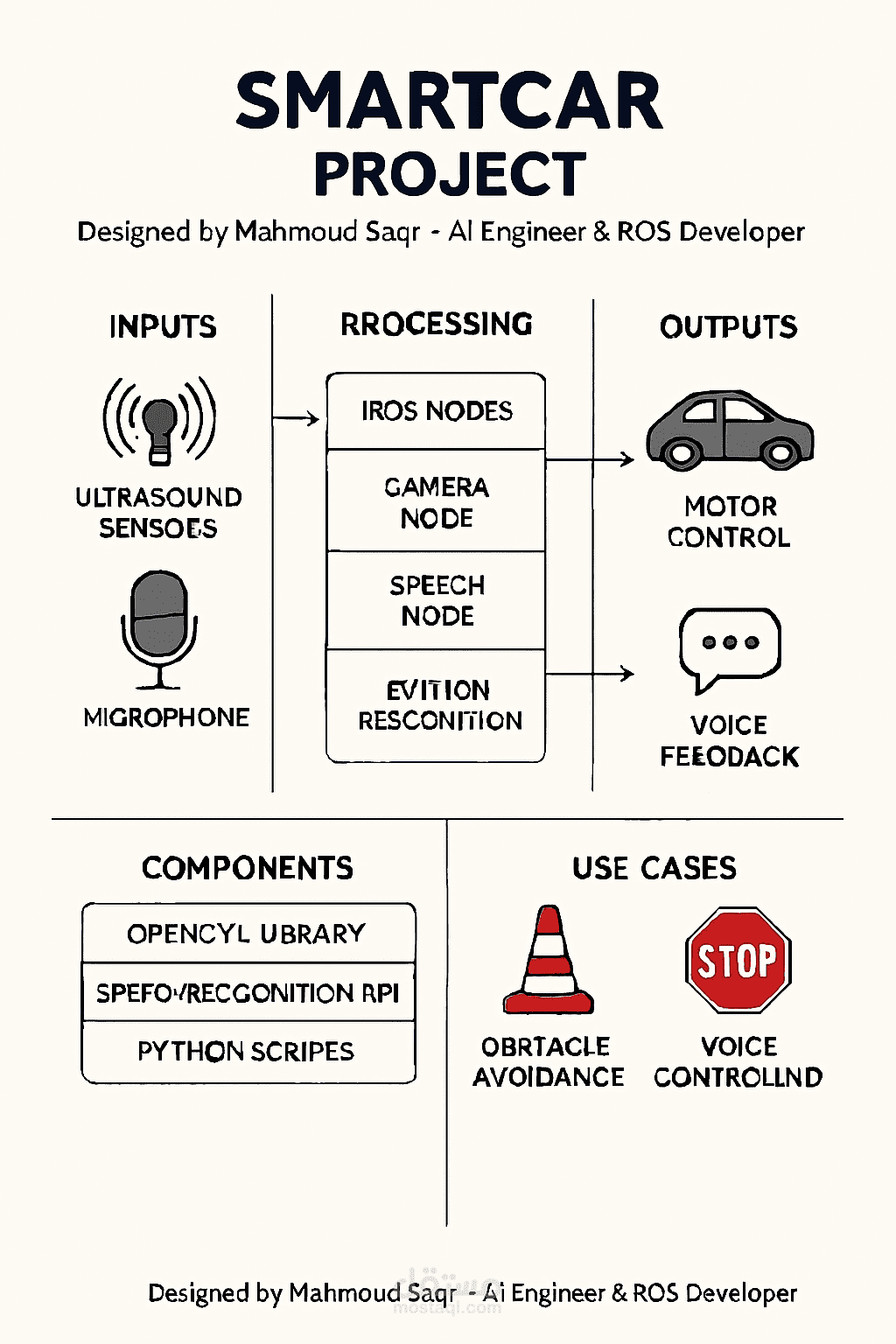
SmartCar is an intelligent vehicle prototype that integrates computer vision and natural language processing to simulate autonomous behavior and human-machine interaction. Designed as a modular system using ROS (Robot Operating System), the project connects software nodes to hardware components, enabling real-time perception and control. The CST can use the car using a user-friendly Application