Autonomous Robotic Car
تفاصيل العمل
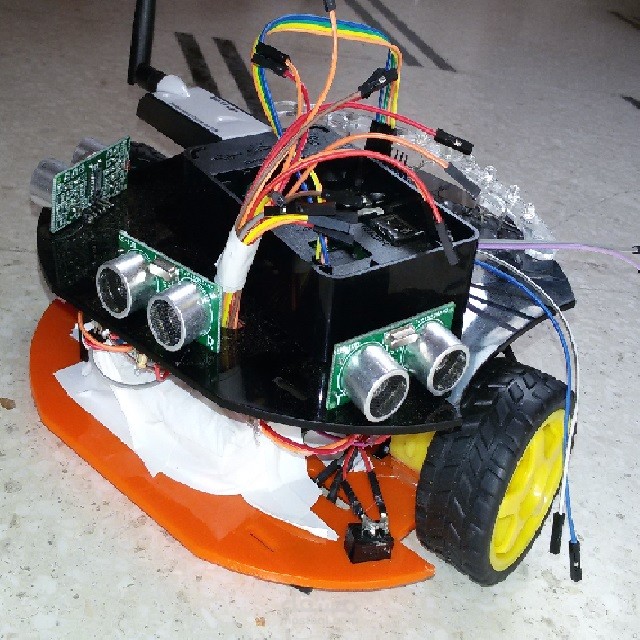

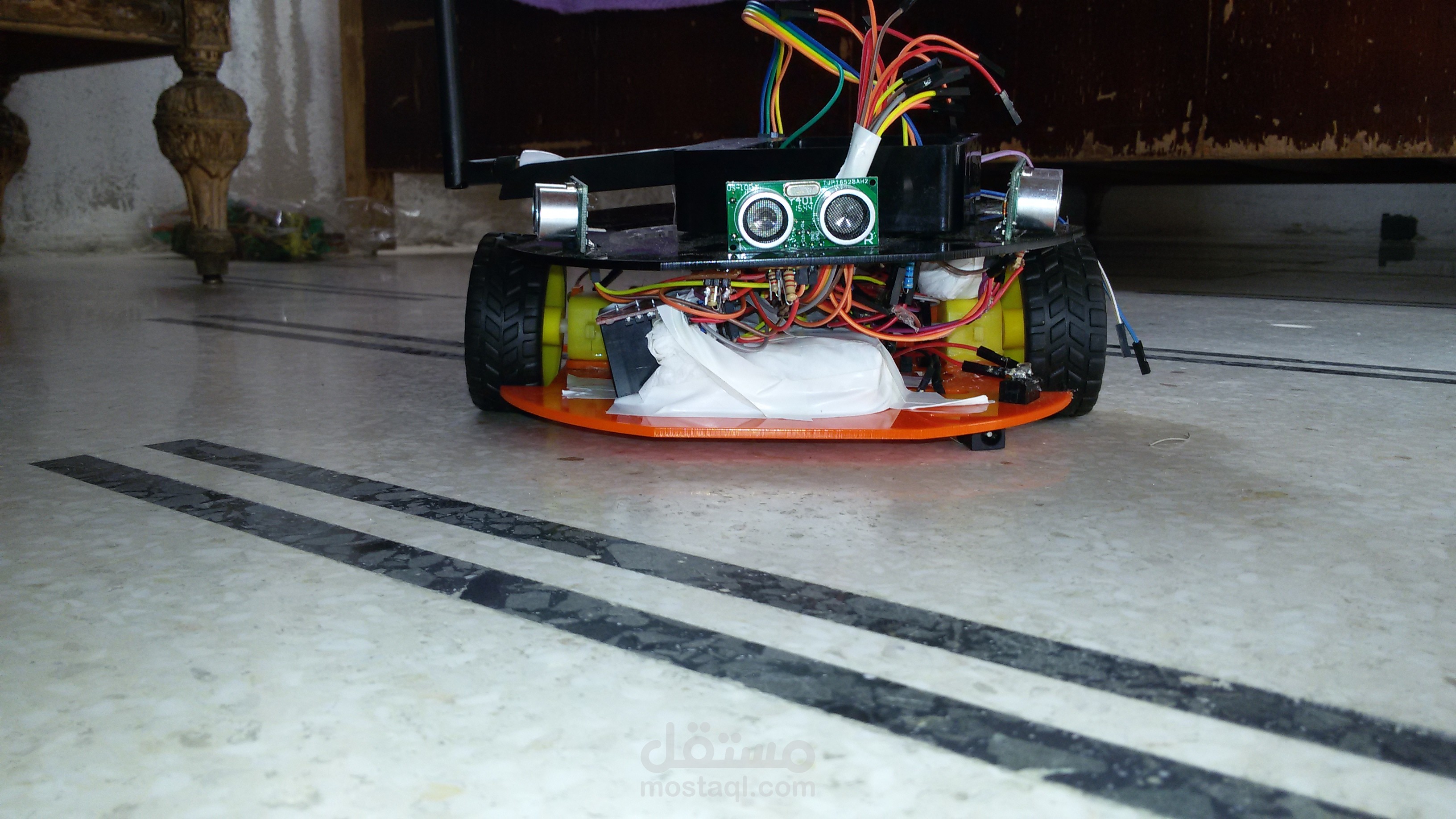

It’s a wheeled robot controlled by a Raspberry Pi 3, it was built as an academic project to prove the concept of fuzzy logic; the robot should drive itself with obstacle avoidance. I’ve led a team of 5 members, we have built the robot from scratch with full pleasure, the scripts were deployed in the SD card of the controller and a UI is connected through a web-socket to the Wi-Fi-connected controller in order to observe sensors status and car velocity.