ADAPTIVE REINFORCEMENT LEARNING FOR SIMULATED ROBOTIC ARM MANIPULATION
تفاصيل العمل
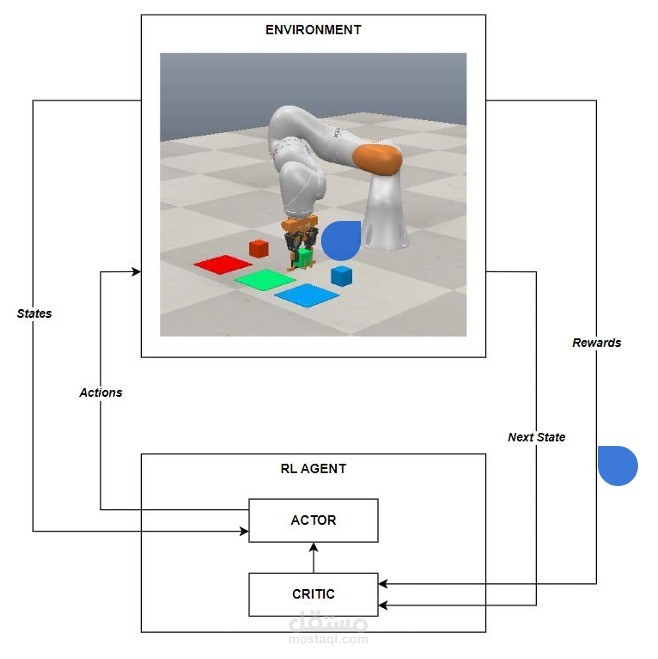
Abstract— This research explores the use of adaptive
reinforcement learning for robotic arm manipulation with a Deep
Deterministic Policy Gradient (DDPG) algorithm. A 7-DOF robotic
arm was controlled using a MATLAB-based system integrated with
CoppeliaSim for simulation, employing a state machine for task
planning and execution. The DDPG algorithm trained an agent using
an actor-critic architecture to manage the continuous action space.
Over 500 episodes, the agent adapted to varying object properties and
tasks, achieving 75.40% accuracy and a 72.00% success rate. The
learning curve was sigmoidal, with an average reward of 24.12 per
episode. Q-value analysis indicated a preference for Lower and Place
actions. The average steps per episode (60.52) suggest efficiency
improvements are needed. The study highlights the need for better
exploration-exploitation balance and advanced techniques like meta
learning to enhance adaptability. Future work should optimize the
reward function, improve exploration strategies, and investigate
sophisticated algorithms for real-world applications.