Gripper Assembly
تفاصيل العمل
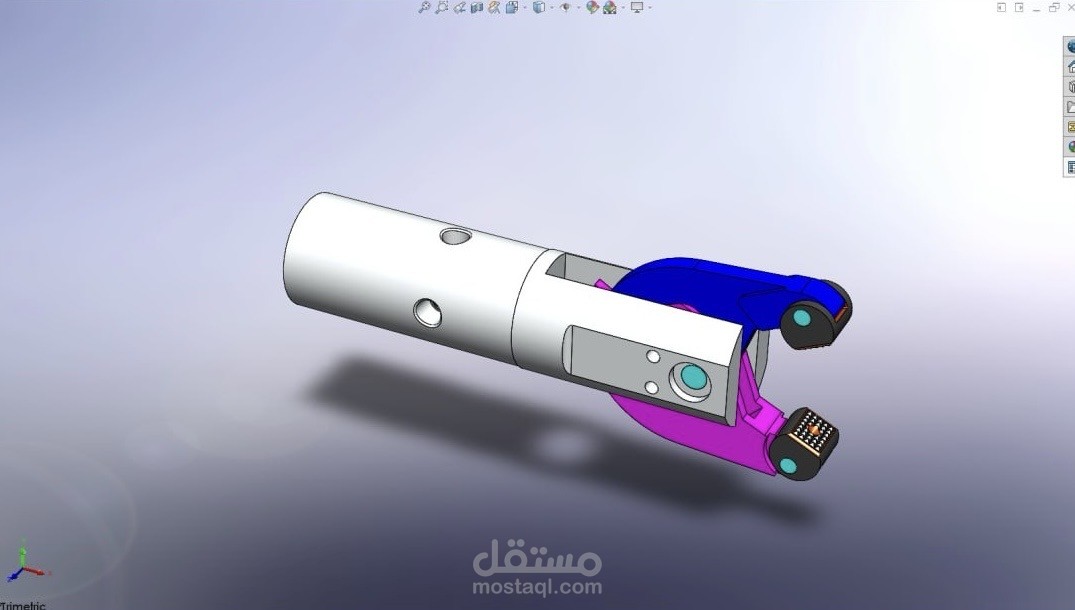
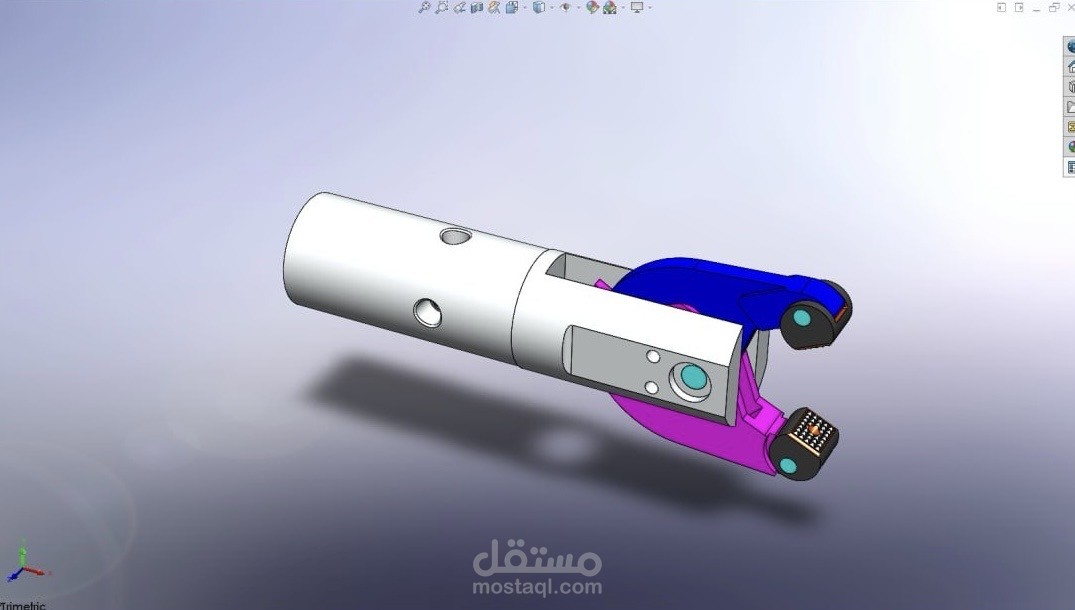
الصورة تعرض تصميم Gripper Assembly باستخدام برنامج SolidWorks، موضح فيه مكوّنات الذراع الميكانيكي وآلية الإمساك. التصميم يوضح الأجزاء المجمعة مثل الفكّين (jaws) وآلية الربط (linkage) مع قاعدة التثبيت، بما يتيح حركة دقيقة للإمساك بالأجسام في التطبيقات الصناعية والروبوتات