Fan with Motor Controller
تفاصيل العمل
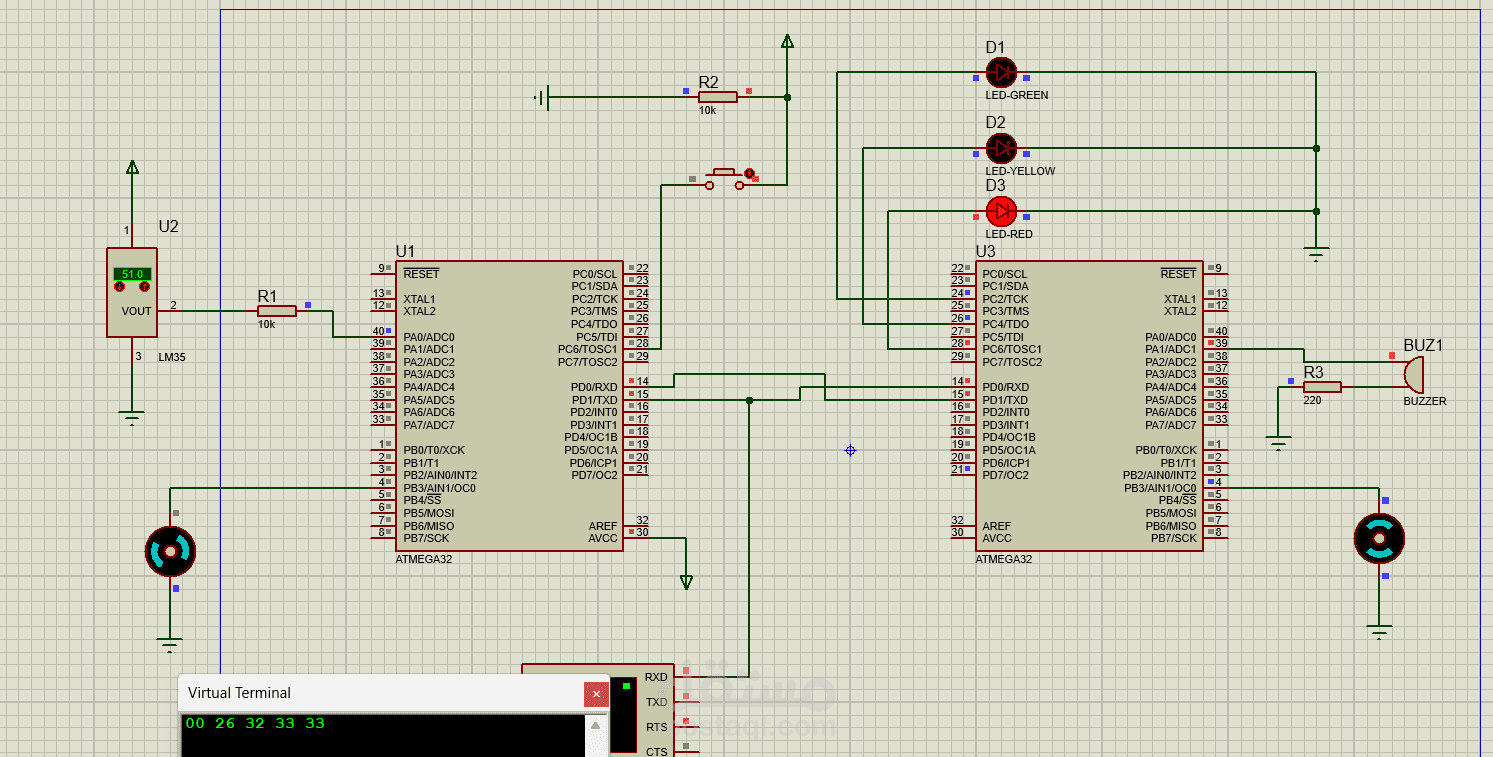
Two MCUs that communicate through UART: MCU1 controls the speed of a motor according to temperature, and
MCU2 receives messages from MCU1 and acts accordingly. (More info in the repo)
Two MCUs that communicate through UART: MCU1 controls the speed of a motor according to temperature, and
MCU2 receives messages from MCU1 and acts accordingly. (More info in the repo)