Kuka_arm_robot
تفاصيل العمل
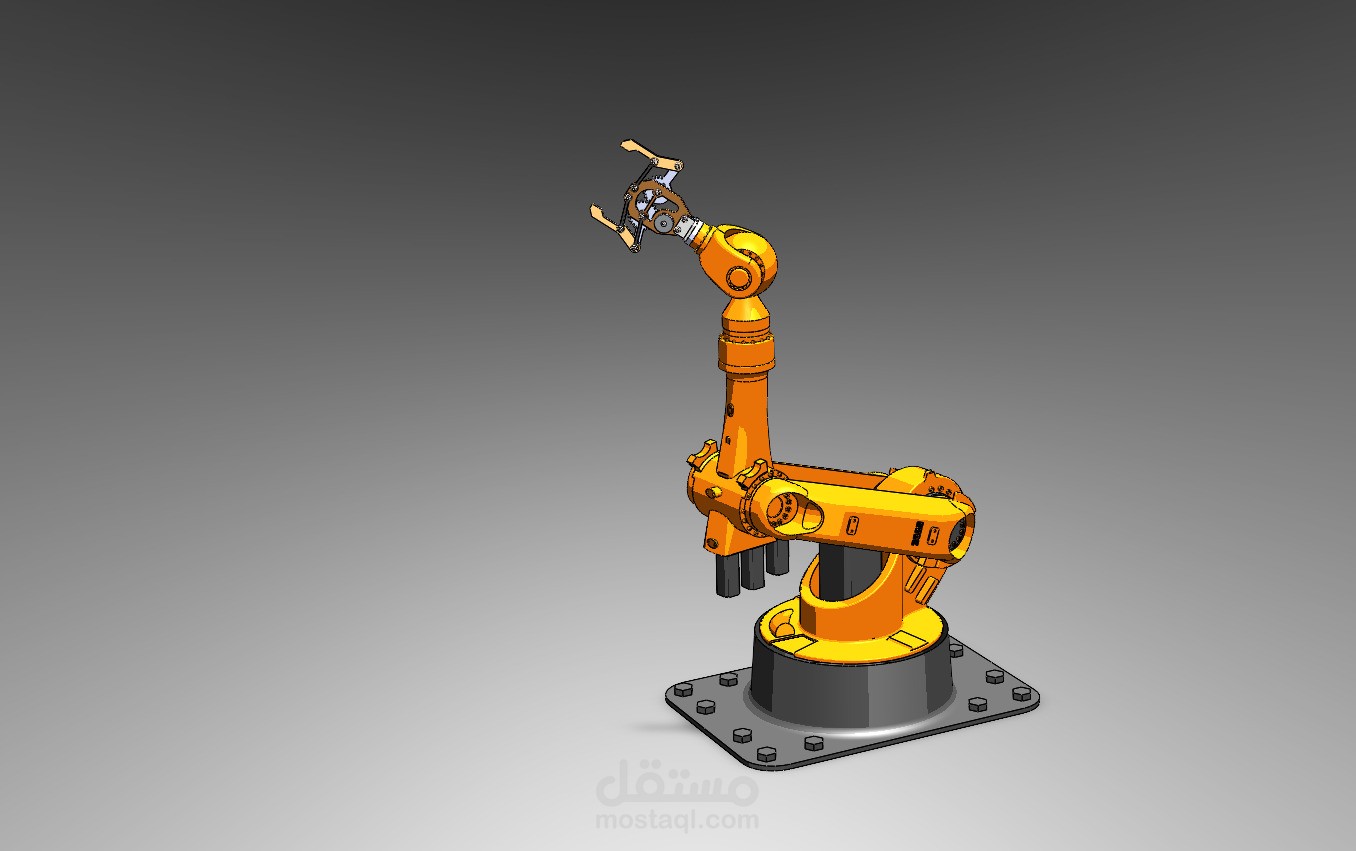
Designed a KUKA industrial robotic arm using SolidWorks, covering detailed 3D modeling of all mechanical components, complete assembly, and motion simulation. Performed kinematic and workspace analysis to ensure smooth joint movement, proper reach, and collision-free operation, with designs prepared for manufacturing and visualization.