Storage Robot
تفاصيل العمل
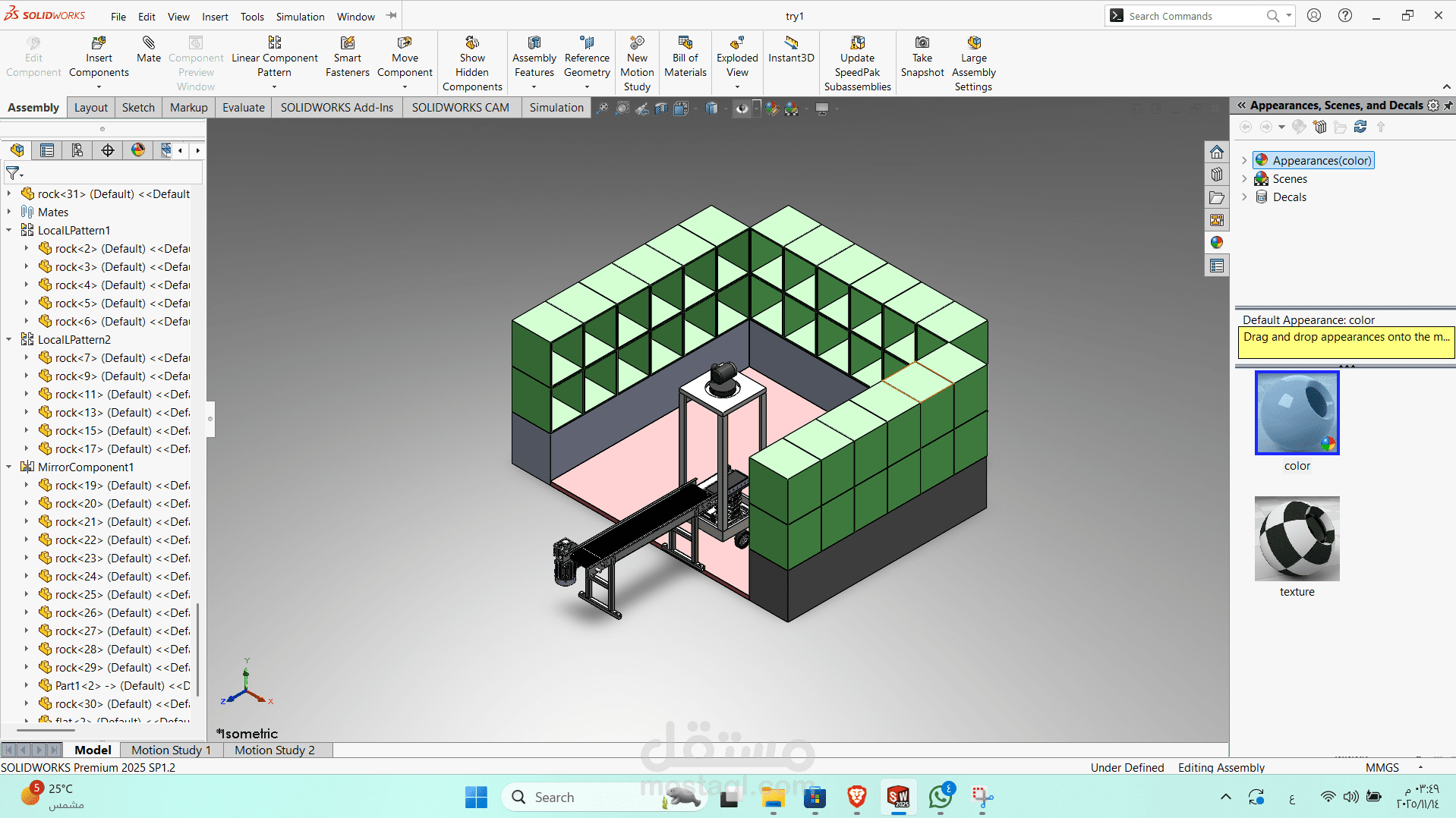
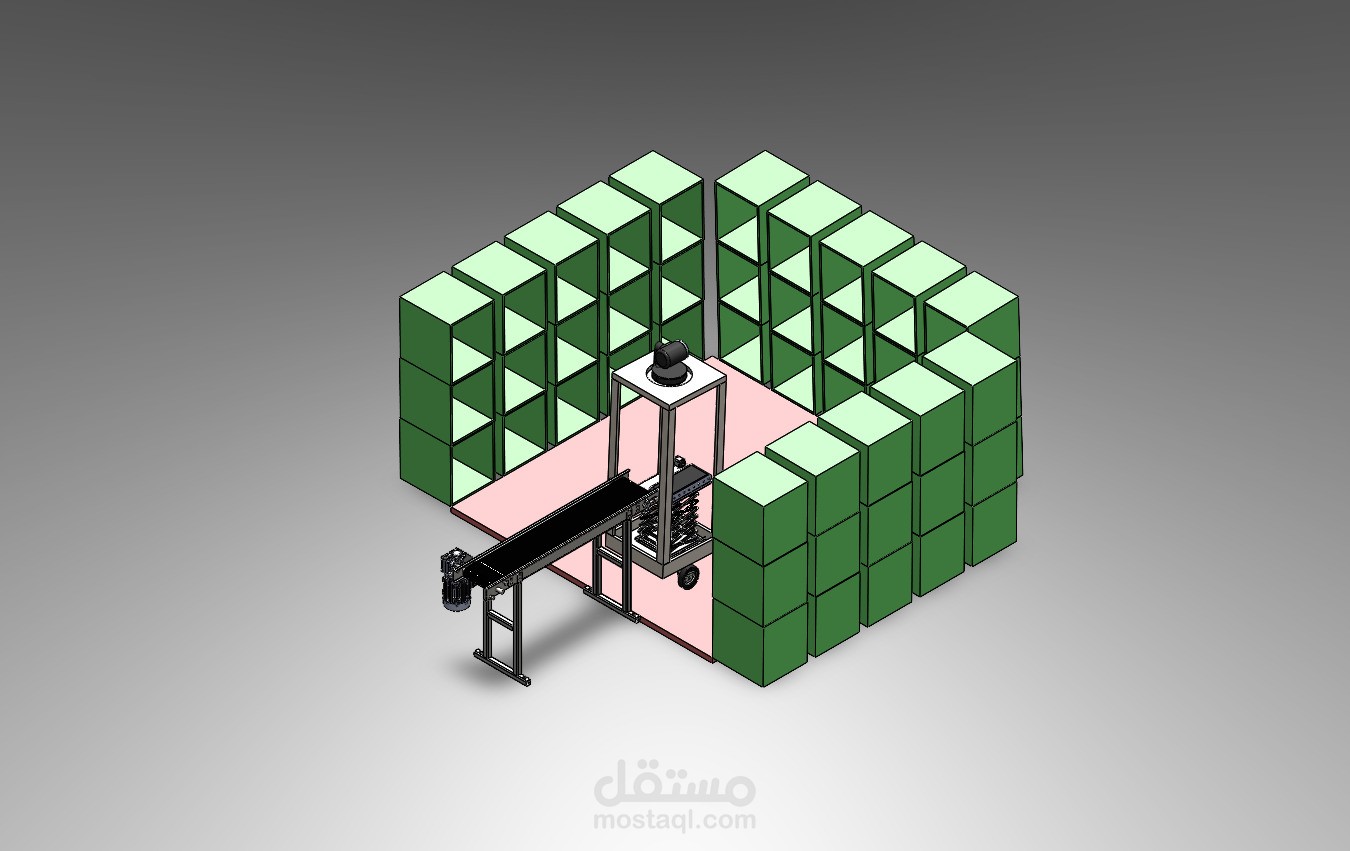
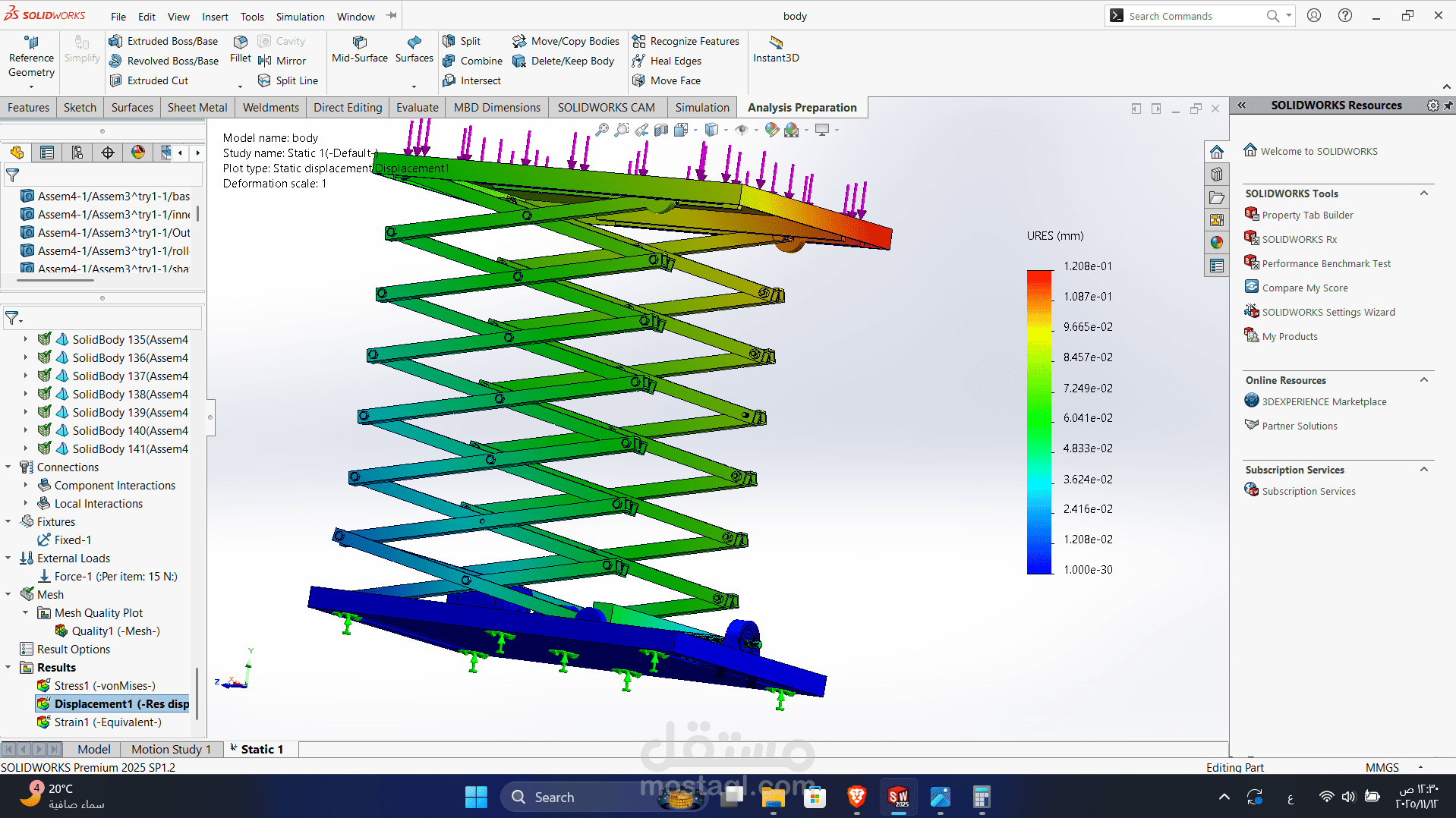
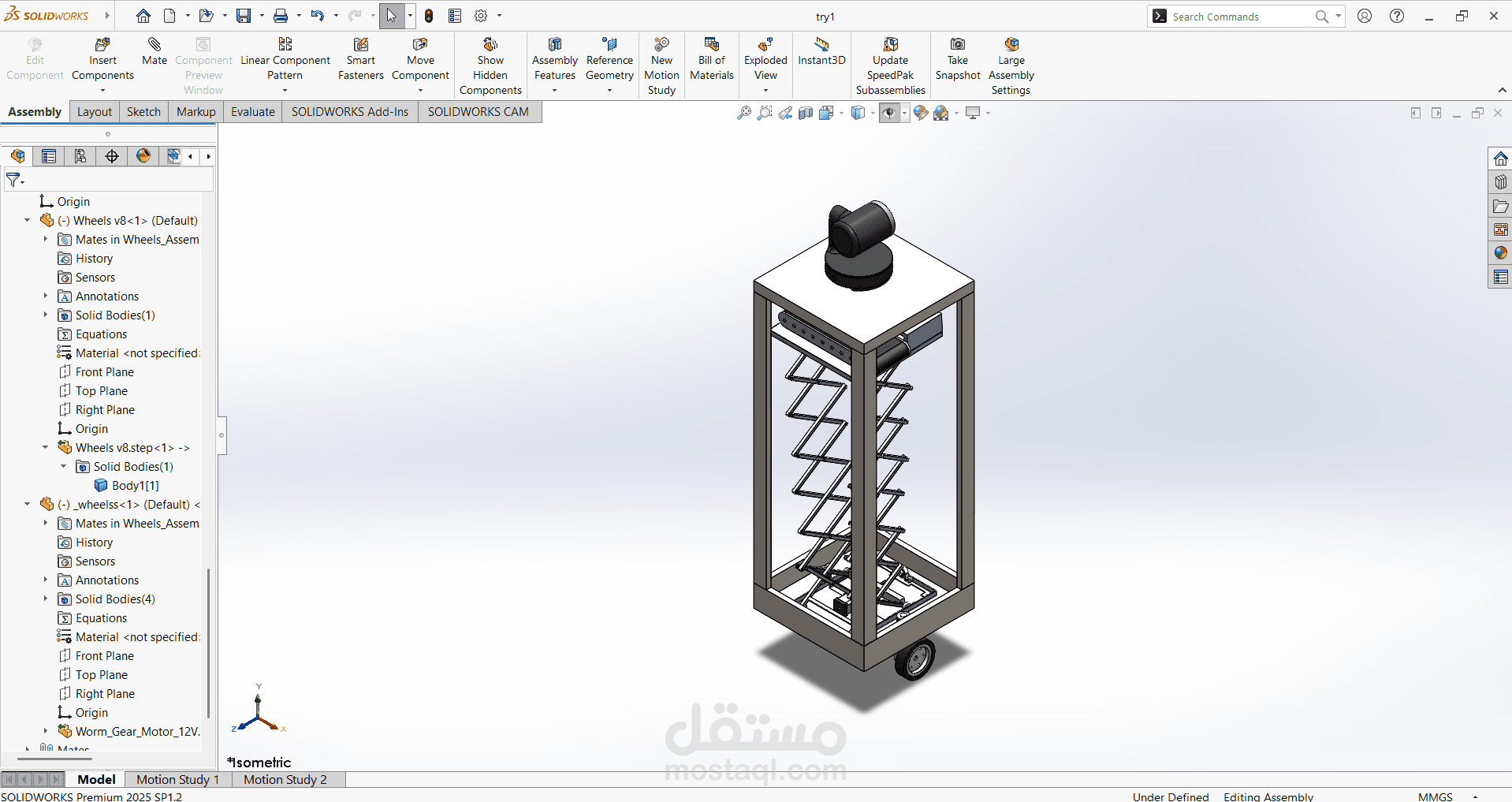
Designed and developed a storage robot using a scissor lift mechanism to handle vertical lifting and storage operations. The project included detailed 3D mechanical design of the robot chassis, scissor lift structure, actuator integration, and load platform using SolidWorks. The design focused on stability, efficient load distribution, smooth vertical motion, and safe lifting of stored items.