Humanoïd Robotic Arm
تفاصيل العمل
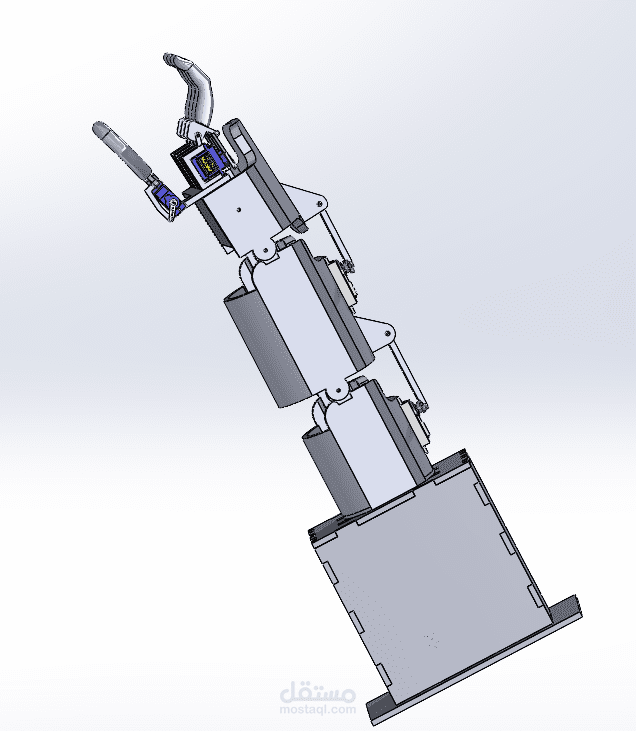
Developed a humanoid robotic arm with three control modes: AI-based gesture recognition, web interface, and MQTT communication. Designed the mechanical structure in SolidWorks and built a custom PCB in EasyEDA. Programmed control logic on ESP32 using C++, integrating servos, stepper motors, and sensors. Enabled real-time remote control and intelligent motion response.