Multi-Lane Self-Driving System Based on ESP32
تفاصيل العمل
Designed and developed an autonomous self-driving car as a graduation project using the ESP32 microcontroller. The system is capable of real-time navigation, multi-lane following, obstacle avoidance, and dynamic path switching based on environmental input.
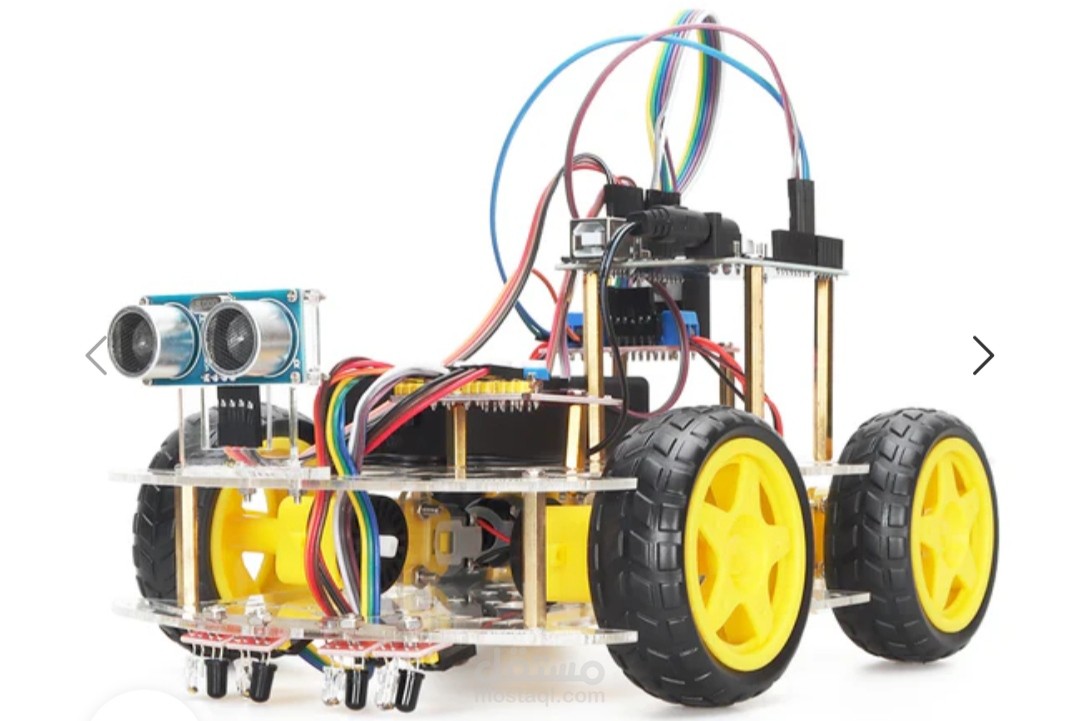
The project integrates multiple components including:
ESP32-CAM for lane detection and basic visual input
Ultrasonic sensors for obstacle detection and avoidance
IR sensors for line and path following
L298N motor driver for controlling DC motorsand car movement
Real-time decision-making based on sensor data to simulate basic autonomous driving