تصميم دوائر الكترونيه (PCB)
تفاصيل العمل
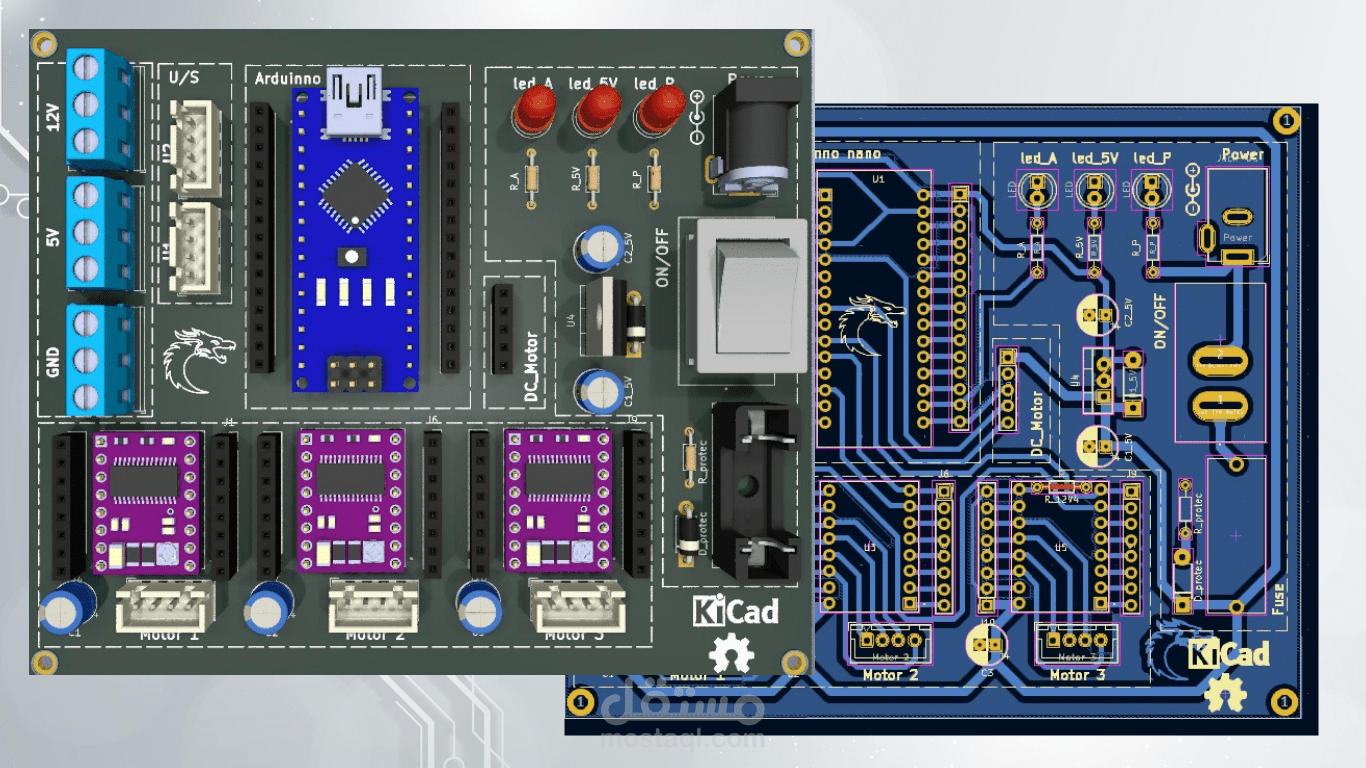
تصميم PCB باستخدام Arduino وMotor Driver للتحكم في ذراع روبوتي وسير نقل منتجات
قمت بتصميم دائرة إلكترونية مطبوعة (PCB) مخصصة للتحكم الكامل في حركة ذراع روبوتي (Robot Arm) وسير ناقل للمنتجات (Conveyor Belt) باستخدام متحكم أردوينو ودوائر قيادة محركات (Motor Drivers)، بما يحقق الدقة في الأداء وسهولة في البرمجة والتشغيل.
تفاصيل المشروع:
الهدف:
تصميم لوحة إلكترونية (PCB) متكاملة للتحكم في حركة ذراع روبوتي وسير نقل باستخدام محركات DC أو Stepper، والتحكم فيها عبر أردوينو.
المكونات الرئيسية المستخدمة:
متحكم: Arduino Nano
Motor Drivers: مثل L298N أو A4988 أو DRV8825
Voltage Regulators: لتغذية الدائرة بمستويات جهد مستقرة
Terminal Blocks: لتوصيل المحركات والحساسات بسهولة
Capacitors وProtection Diodes
Connectors لتسهيل البرمجة وتوصيل الإشارات الخارجية
وظائف اللوحة:
التحكم في 3 إلى 6 محركات (محركات ذراع وسير النقل)
منافذ لتوصيل الحساسات (limit switches, IR, proximity)
تغذية مستقلة للمحركات والدائرة المنطقية
دائرة حماية من الانعكاس والتيار الزائد
إمكانية إضافة بلوتوث أو واي فاي للتحكم اللاسلكي
مؤشرات LED لحالة التشغيل
مراحل التنفيذ:
تصميم الدائرة على برنامج مثل Proteus أو KiCad أو EasyEDA
رسم مخطط PCB بدقة مع مراعاة العزل بين إشارات الجهد العالي والمنخفض
تصميم لوحة بطبقة واحدة أو طبقتين حسب الحاجة
إخراج ملفات التصنيع Gerber وBOM
اختبار المحاكاة والتأكد من صحة التوصيلات قبل التصنيع
مميزات المشروع:
تصميم احترافي موفر للمساحة ومنظم للأسلاك
إمكانية التوسعة مستقبلاً
برمجة سهلة باستخدام Arduino IDE
مرونة في التشغيل اليدوي أو التلقائ
مناسب لمشاريع الأتمتة الصناعية أو البحث العلمي