obstacles car
تفاصيل العمل
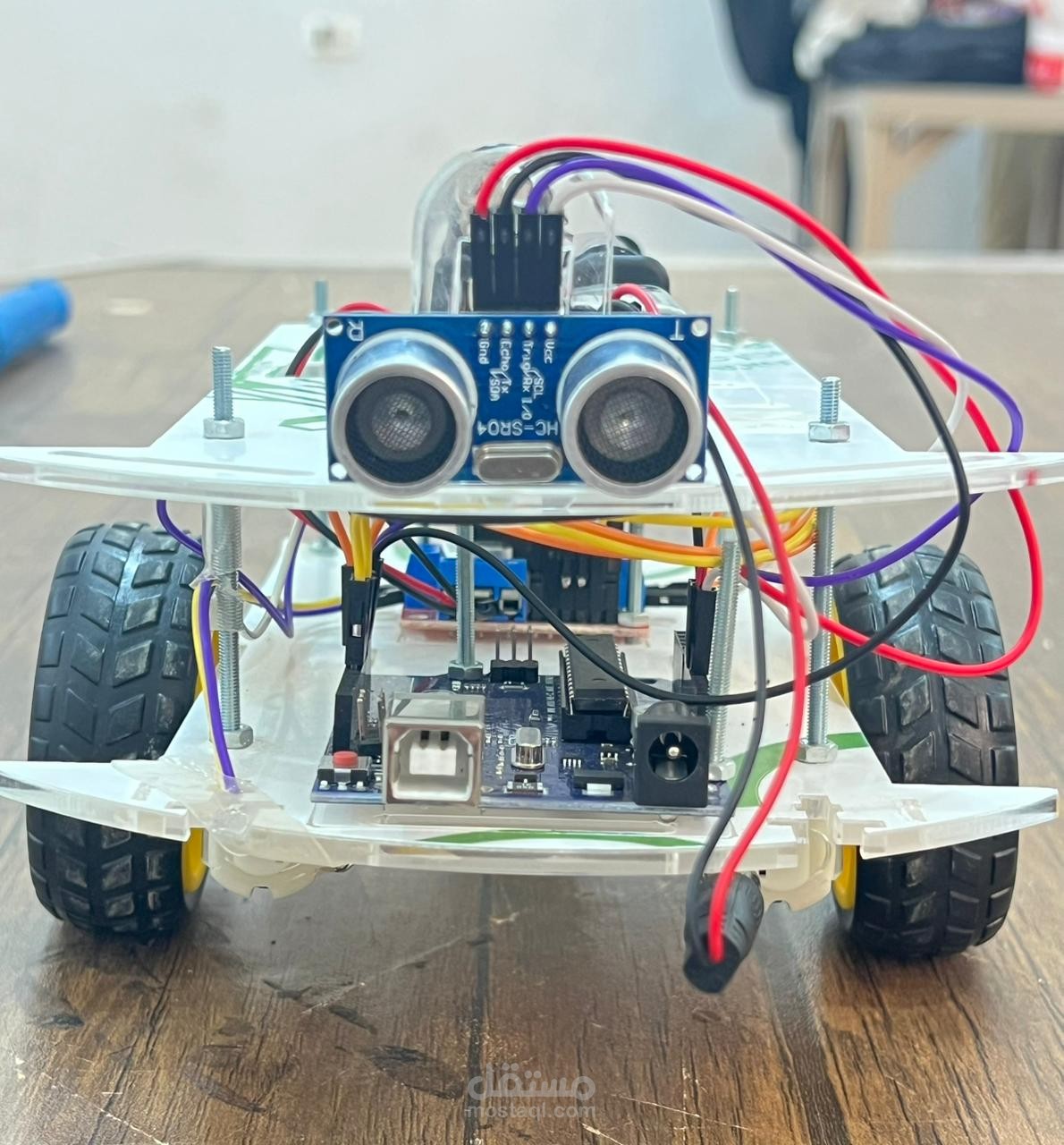
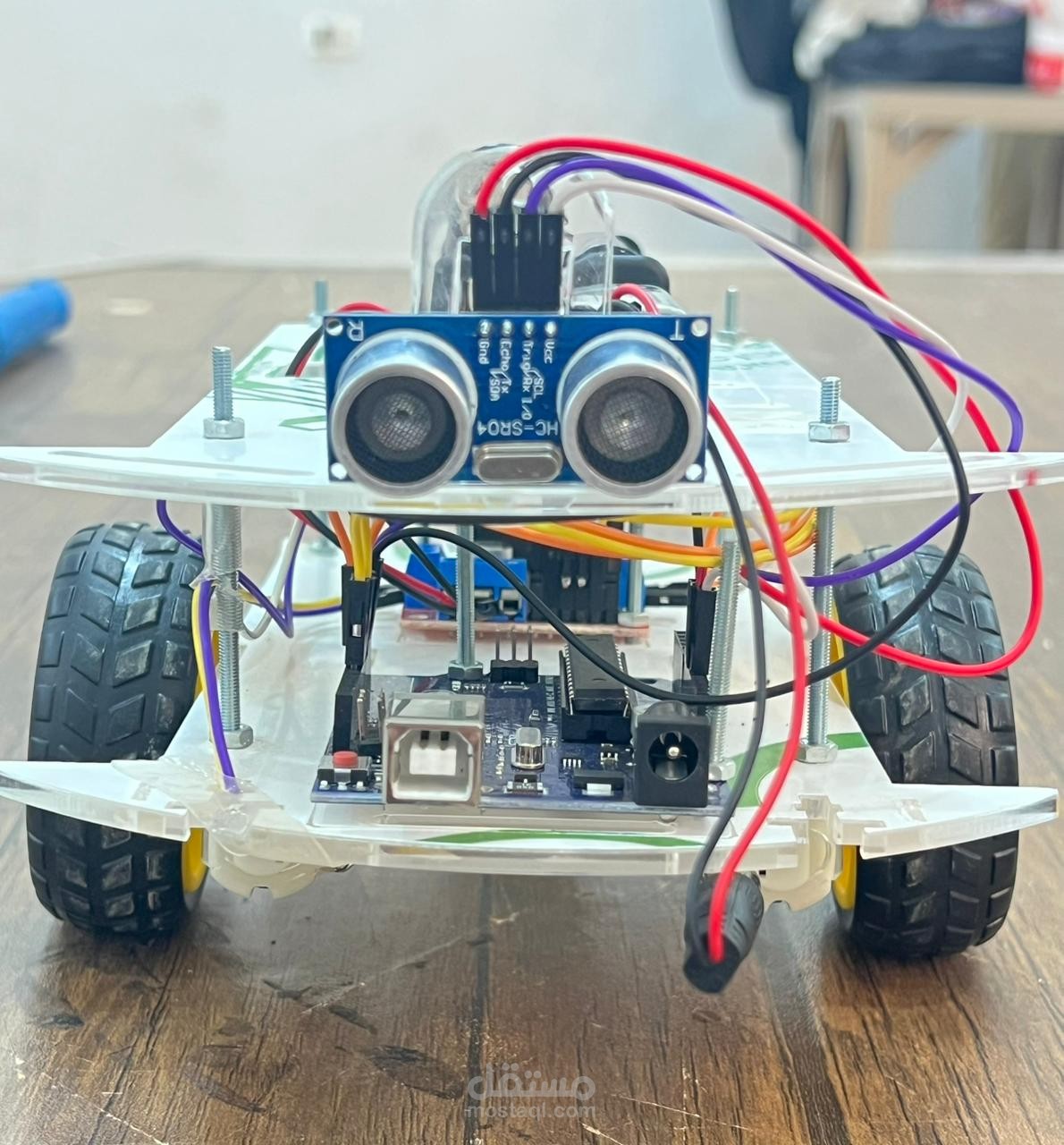
Obstacle Avoidance Car using Arduino
Developed an autonomous robot car using Arduino UNO, ultrasonic sensors, and DC motors that detects and avoids obstacles in its path. The system continuously measures the distance to nearby objects and intelligently changes direction to avoid collisions. This project demonstrates real-time sensor integration, motor control, and decision-making in embedded systems.
---
Key Components:
Arduino UNO
Ultrasonic Sensor (HC-SR04)
L298N Motor Driver
DC Motors
Power Supply / Battery
Chassis