تصميم وتنفيذ روبوت سداسي الأرجل متحرك باستخدام نظام كرانك ميكانيكي وطباعة ثلاثية الأبعاد
تفاصيل العمل
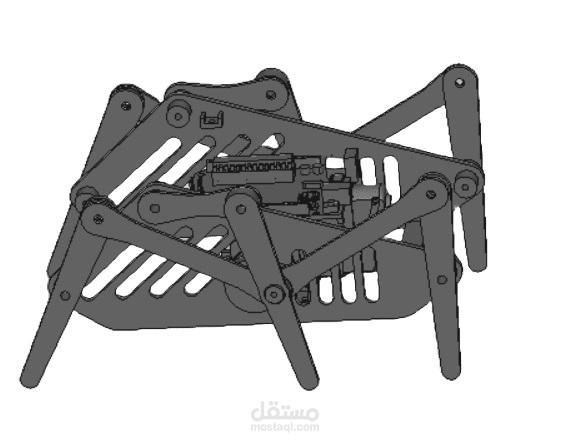
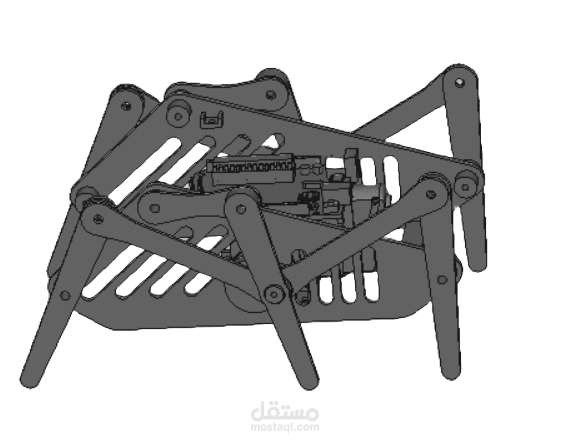
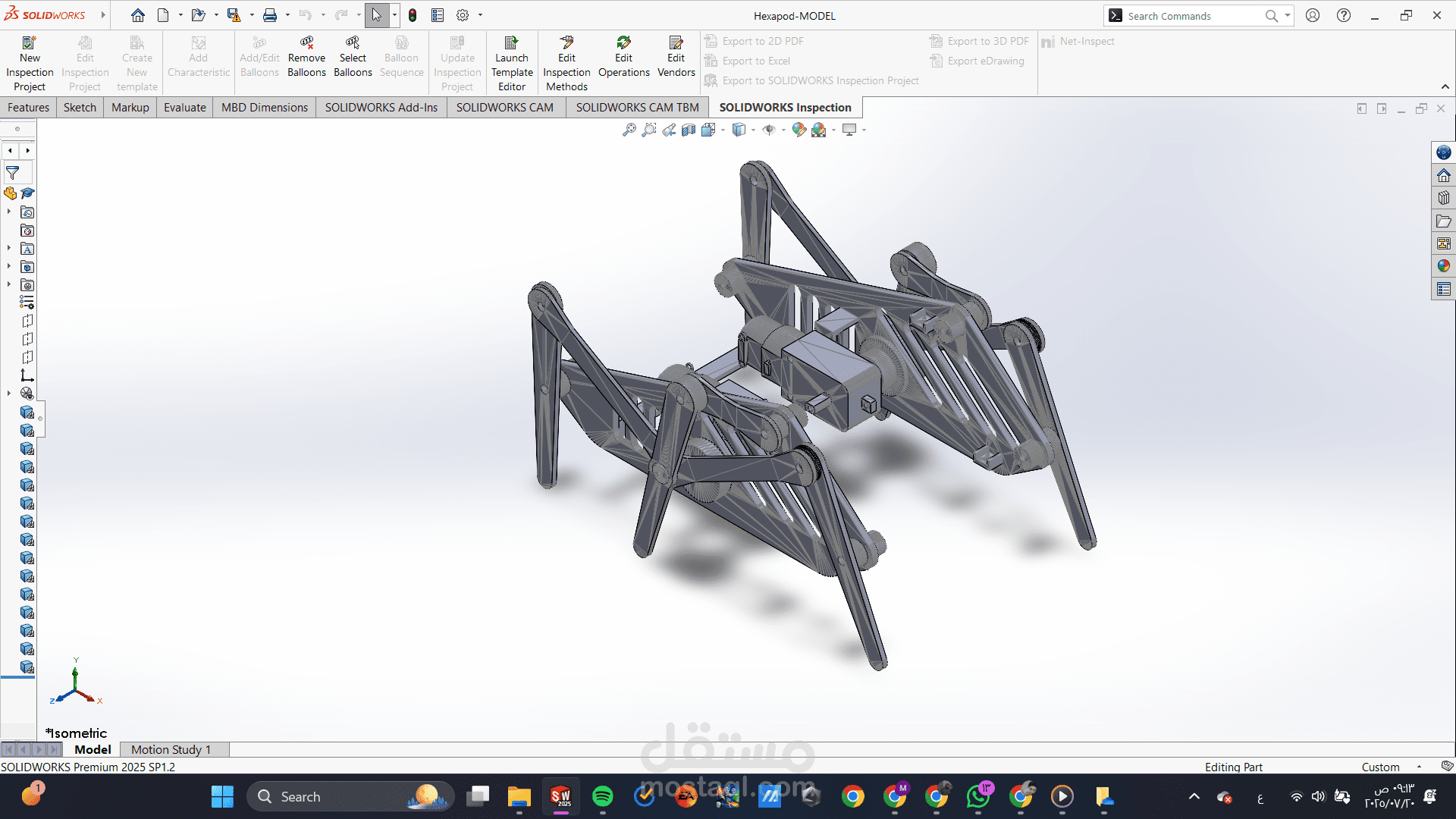
قمت بتصميم وتنفيذ روبوت سداسي الأرجل (Hexapod Walking Robot) باستخدام SolidWorks وتم تنفيذه باستخدام الطباعة ثلاثية الابعاد
تفاصيل ما تم تنفيذه:
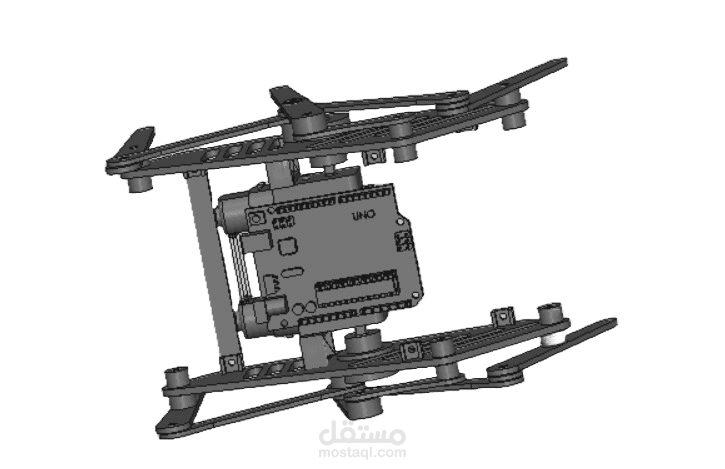
تصميم ميكانيكي كامل للروبوت باستخدام روابط وجوينتات ميكانيكية.
تطوير نظام حركة مركزي يعمل بمحركين فقط، لتحريك الأرجل الستة في نمط مشي متناسق باستخدام آلية كرانك (Crank-Based Linkage System).
تحليل عدد درجات الحرية (DOF) بدقة باستخدام معادلات Gruebler.
التغلب على تحديات توزيع الوزن واتزان مركز الجاذبية.
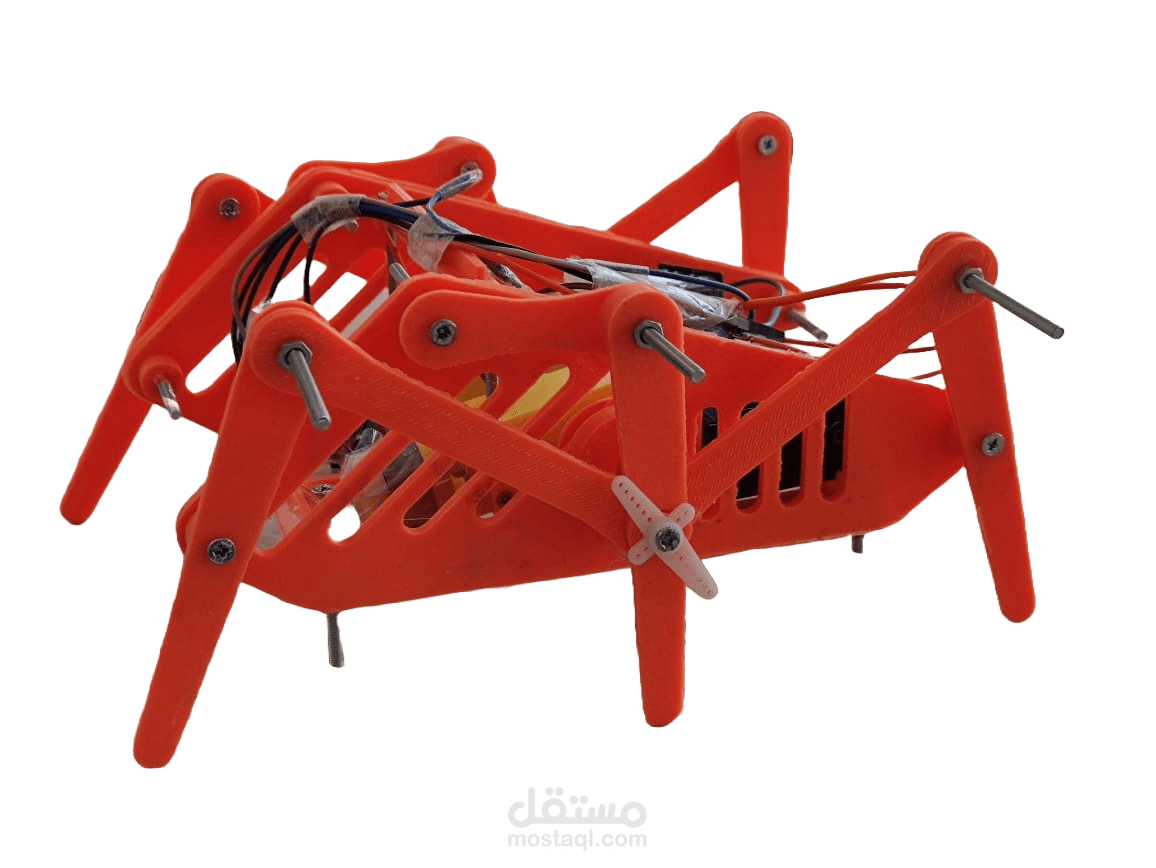
تنفيذ النموذج باستخدام تصميم CAD ثم طباعة ثلاثية الأبعاد (3D Printing).
اختبار النموذج وتحليل الأداء الميكانيكي والسلوك الحركي على أرض الواقع.
توثيق الأخطاء والانحرافات الحركية وتحليل أسبابها (مثل عدم اتزان مركز الثقل أو ميلان أحد الأرجل).