Study and design of a satellite communications system for a maritime environment
تفاصيل العمل
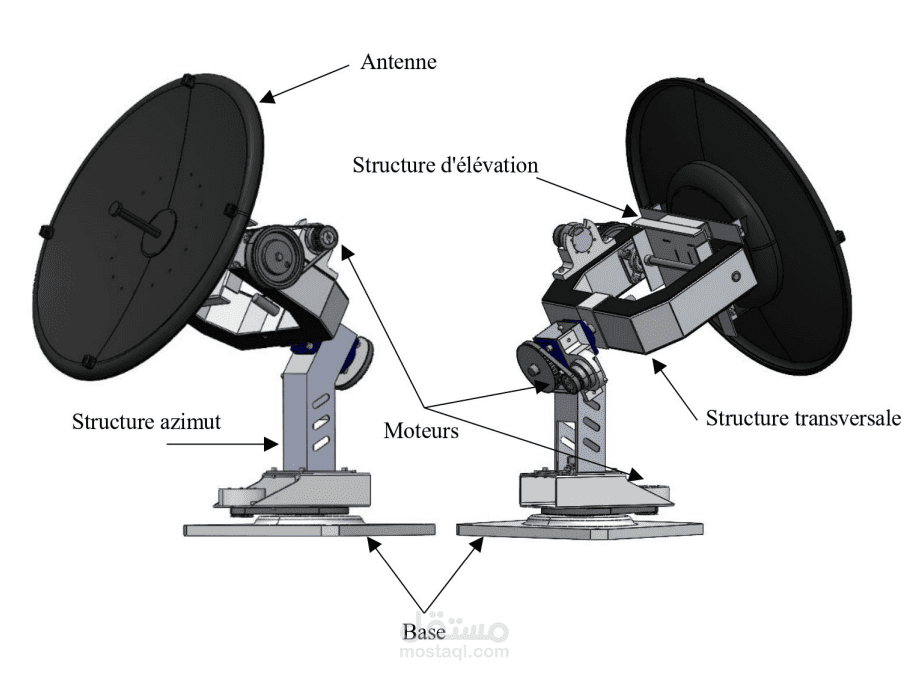
design and modelisation of system •
Development of a robotic computation model using Python, including geometric and kinematic modeling
based on Denavit-Hartenberg parameterization, to identify system singularities and define the workspace
Application of DFMA principles to reduce production and assembly costs while improving product quality•
Creation of a torque calculation model based on Lagrangian mechanics (dynamic modeling)•
Finite Element Analysis (FEA) of parts and tolerance analysis to validate design integrity•
Drafting of technical documentation for manufacturing purposes•