روبوت مارس روفر
تفاصيل العمل
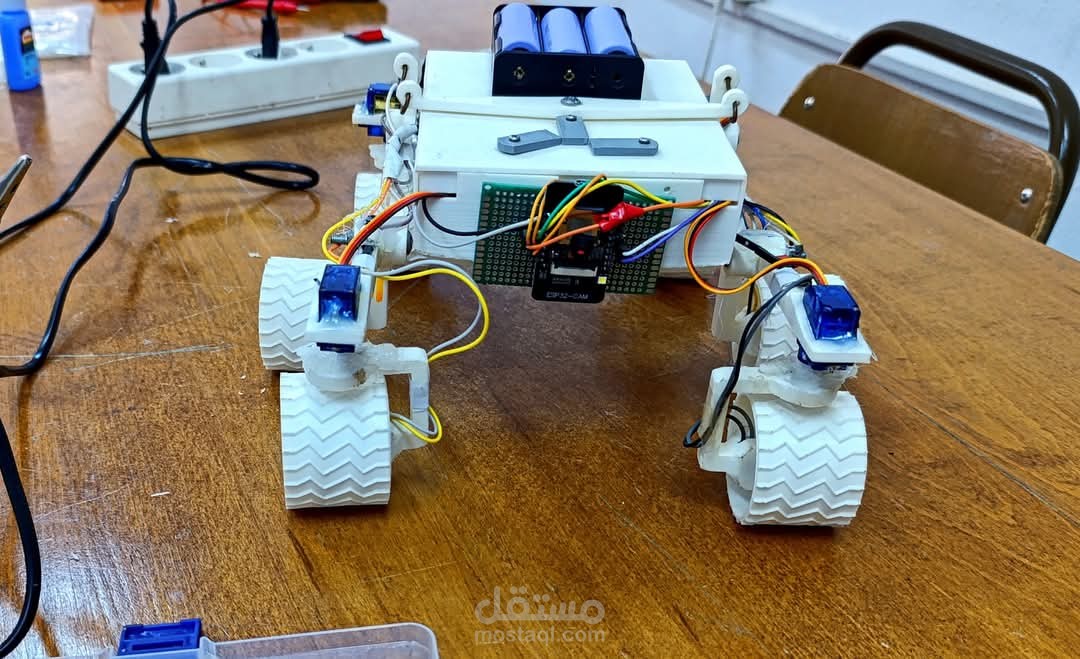
قمت بتصميم وتصنيع روبوت مستوحى من عربة Mars Rover، باستخدام تقنيات حديثة في الطباعة ثلاثية الأبعاد والتحكم عن بعد، بهدف محاكاة وظائف الاستكشاف والمراقبة في بيئات وعرة.
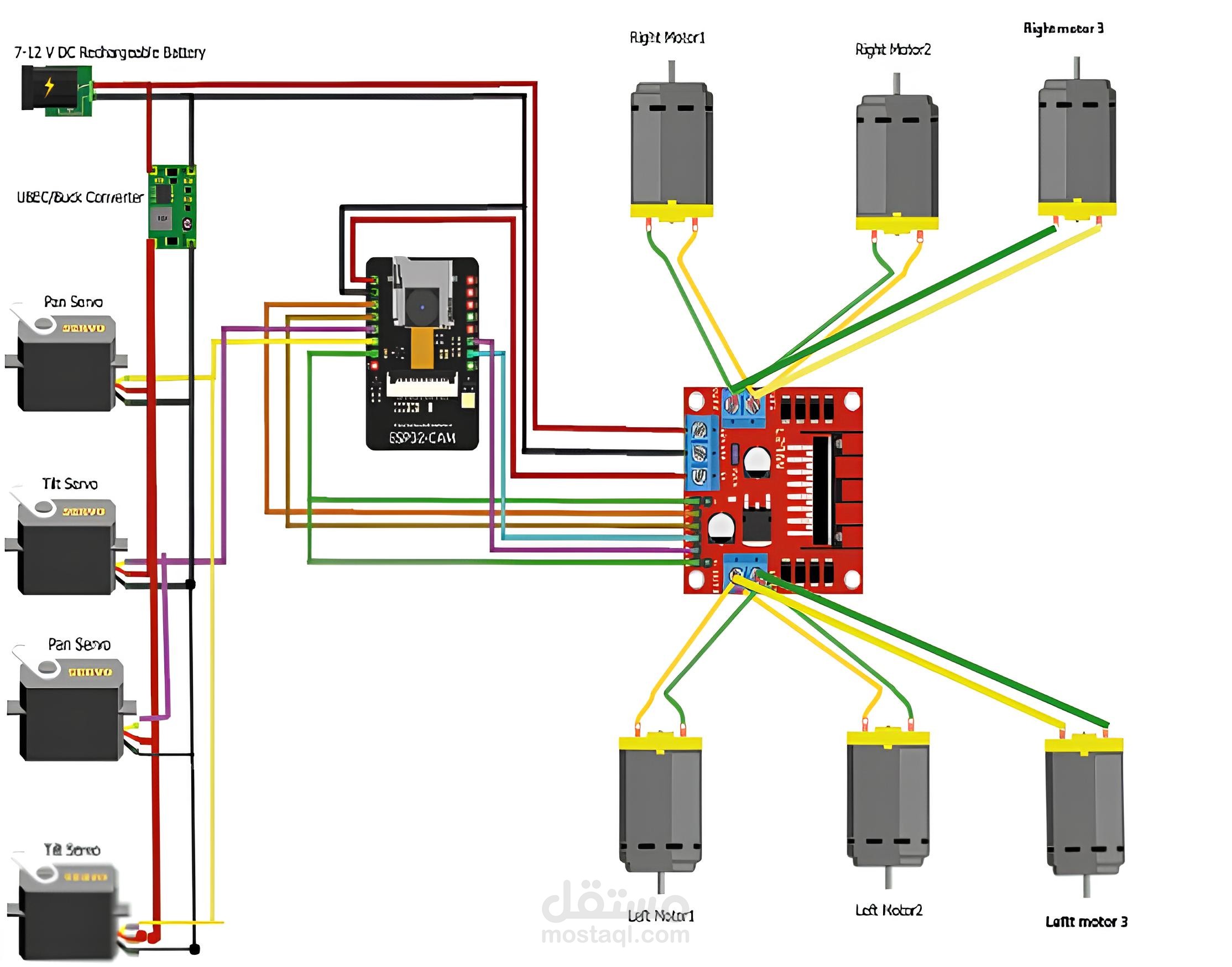
️ المكونات والوظائف:
تصميم ميكانيكي متكامل باستخدام الطباعة ثلاثية الأبعاد (3D Printing) لتصنيع الهيكل الخارجي
استخدام ESP32-CAM لتوفير بث مباشر للفيديو عبر شبكة Wi-Fi
تحكم كامل في الروبوت عن طريق هاتف ذكي (Smartphone Teleoperation) عبر واجهة مخصصة
إرسال واستقبال الأوامر والتحكم عن بعد عبر Wi-Fi
نظام تعليق للعجلات (Wheel Suspension) لتجاوز العقبات ومواجهة التضاريس غير المستوية
تصميم العجلات والمفاصل لتحقيق حركة مرنة ومستقرة
الروبوت يقدم تجربة شبه واقعية لمحاكاة عربات الاستكشاف الفضائي، ويُظهر إمكانية تطوير أنظمة ذكية متنقلة منخفضة التكلفة ومرنة.