Autonomous Stair-Cleaning Robot
تفاصيل العمل
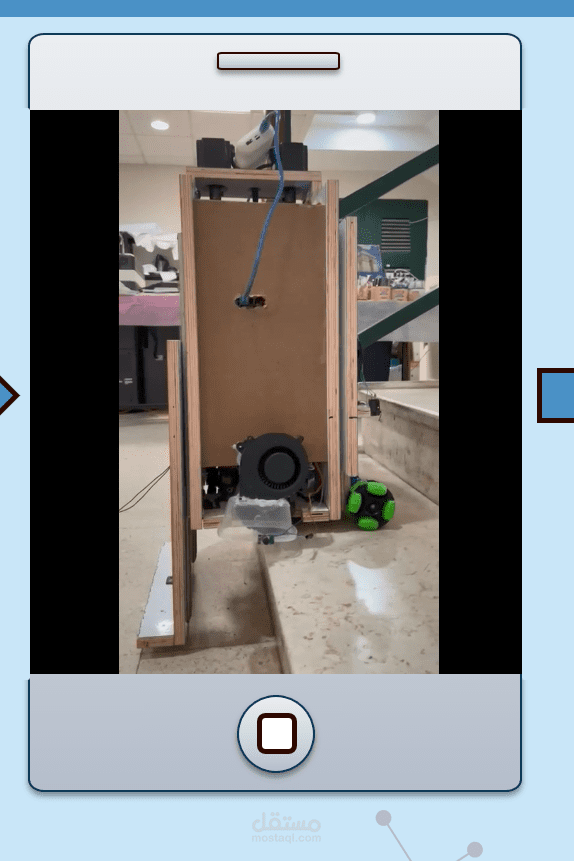
Designed and developed a robotic system capable of detecting, climbing, and cleaning stairs
autonomously. Integrated OAK-D camera for smart stair detection, Arduino and Raspberry Pi for
motor and sensor control, and a rotating brush cleaning mechanism. Successfully demonstrated
efficient stair navigation and cleaning, highlighting advancements in automation for challenging
environments.