robot navigation simulation and integration of slam and yolo محاكات ربوت واستخدام خوارزمية slam و yolo
تفاصيل العمل

تطوير روبوت ذكي باستخدام ROS2 وYOLOv8 للكشف عن الأجسام والتنقل الذاتي (YOLOBot)
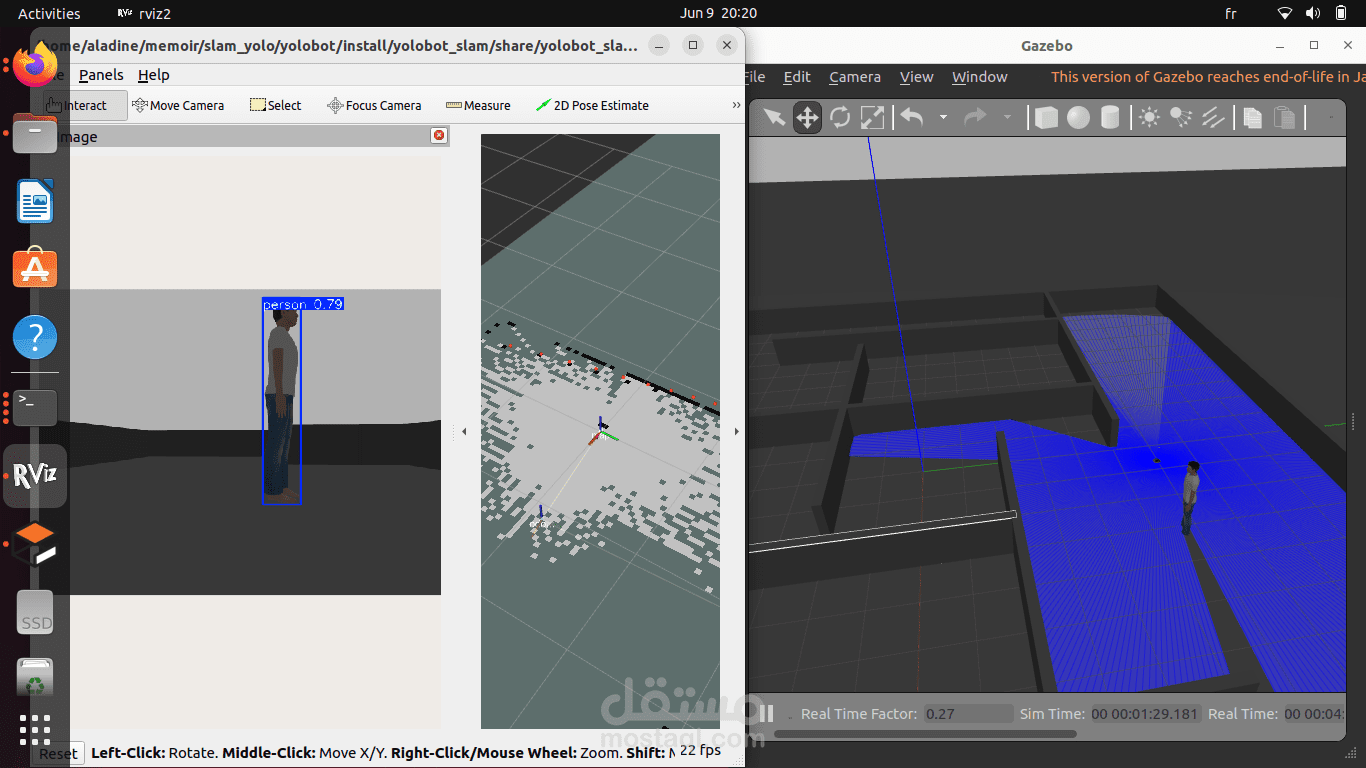
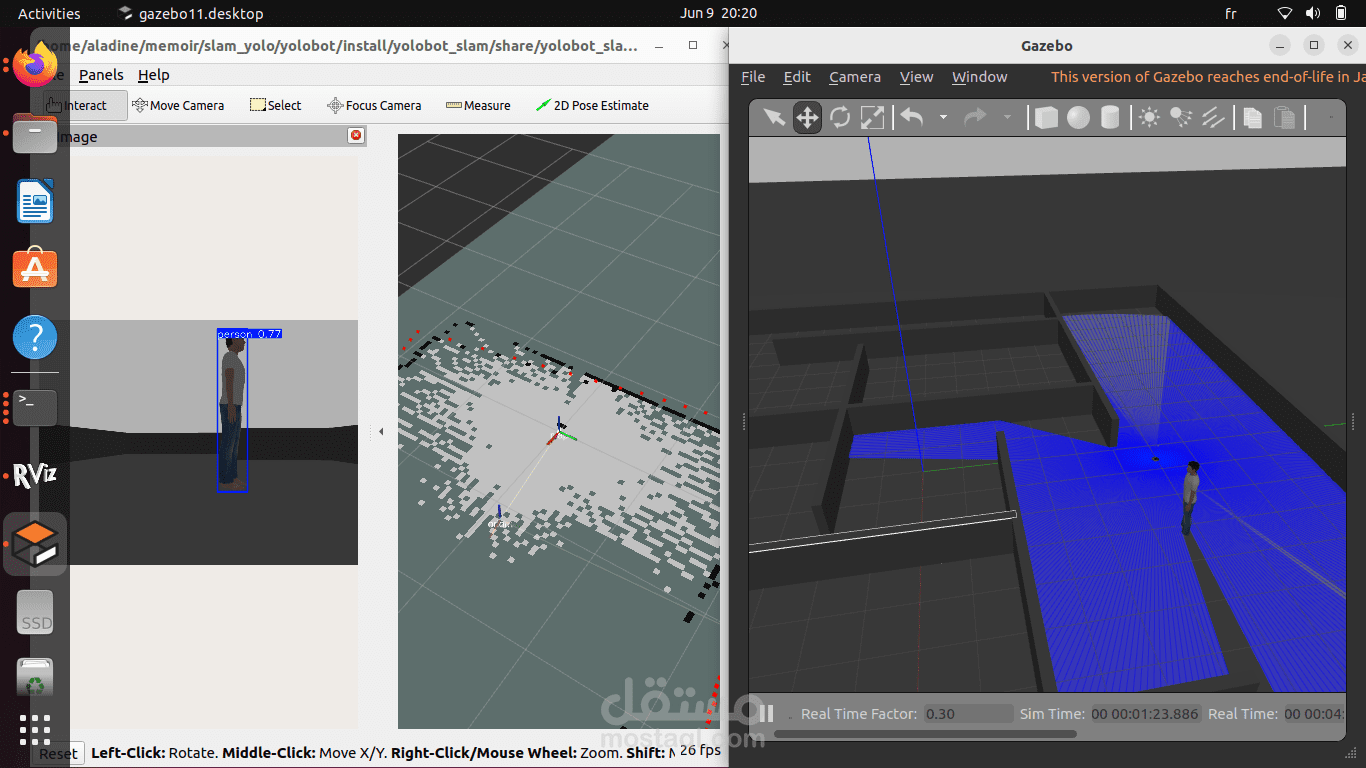
مشروع تقني متقدم يجمع بين تقنيات الروبوتات الذكية، SLAM، والمحاكاة باستخدام Gazebo، مع الكشف عن الأجسام في الزمن الحقيقي باستخدام YOLOv8. يعتمد المشروع على ROS2 (نسخة Humble أو أحدث)، ويوفر بيئة متكاملة لتطوير واختبار روبوت قادر على استكشاف بيئته وبناء خريطة لها والتعرف على الأجسام المحيطة به.
المميزات الرئيسية:
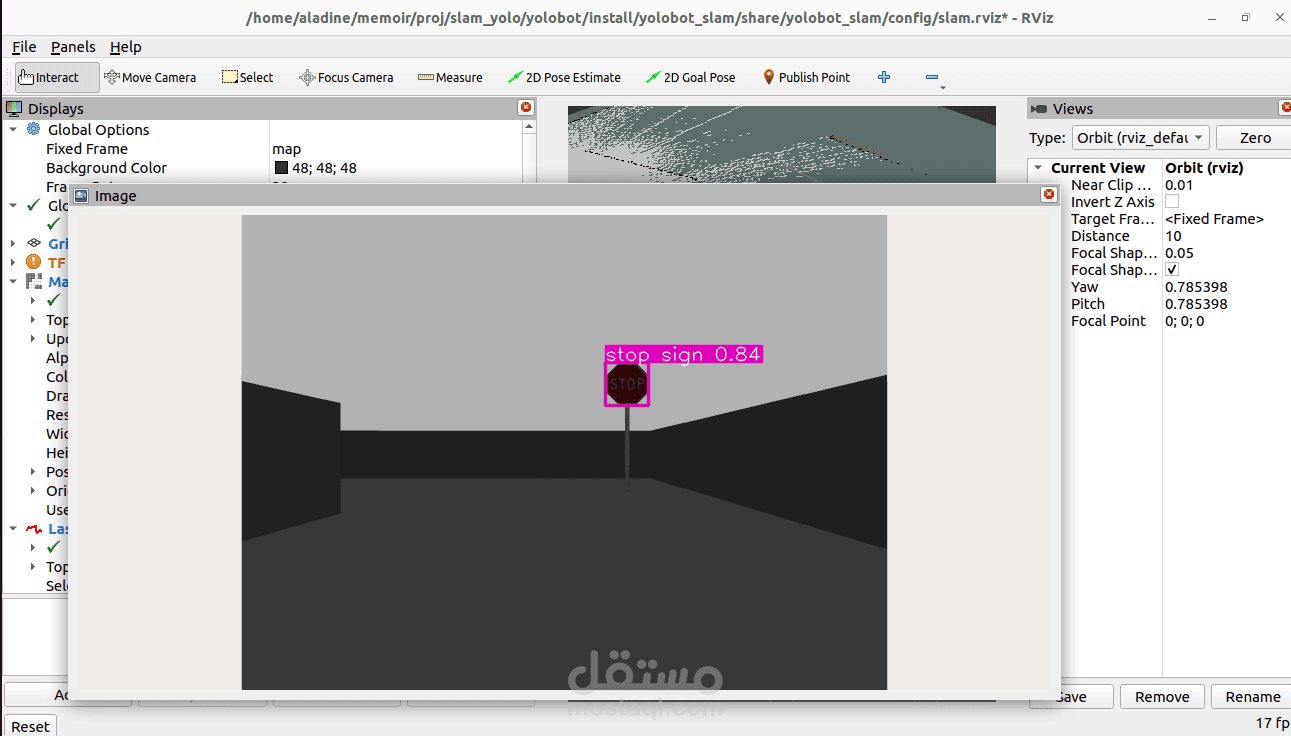
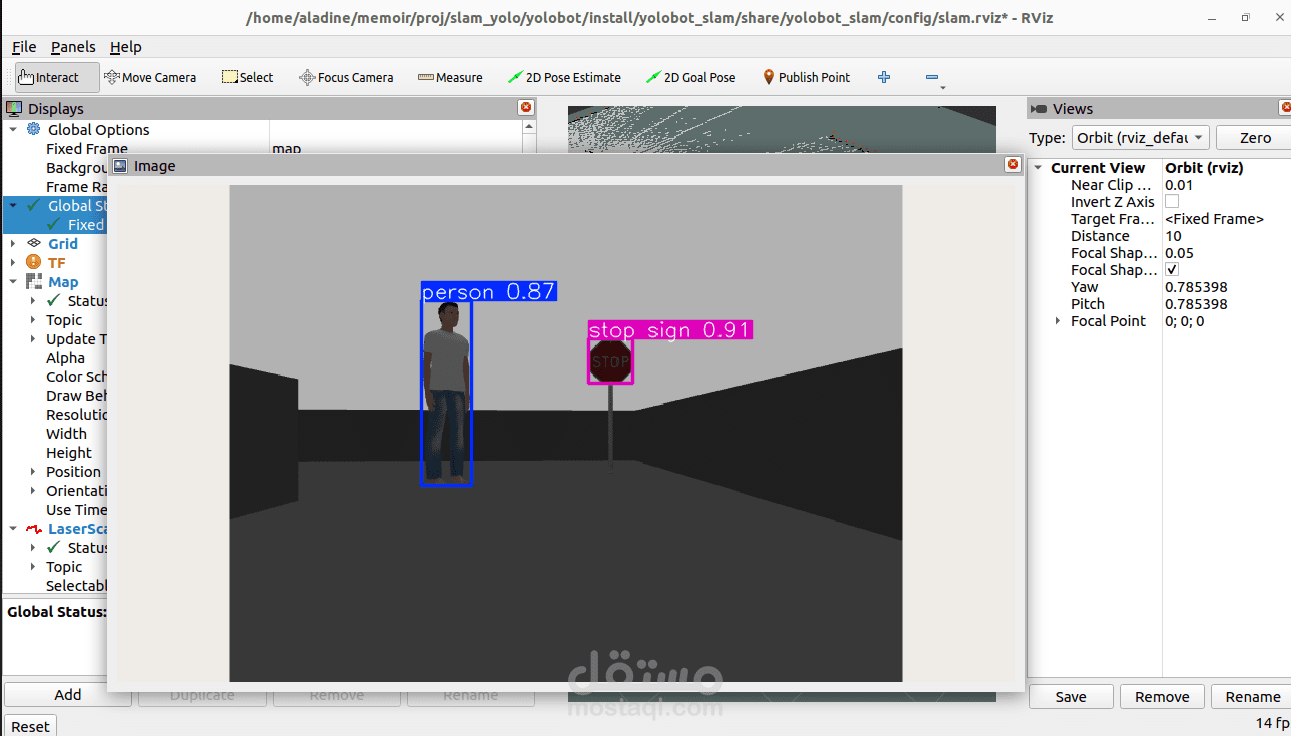
كاشف الأجسام YOLOv8 مدمج للعمل في الزمن الحقيقي داخل المحاكاة.
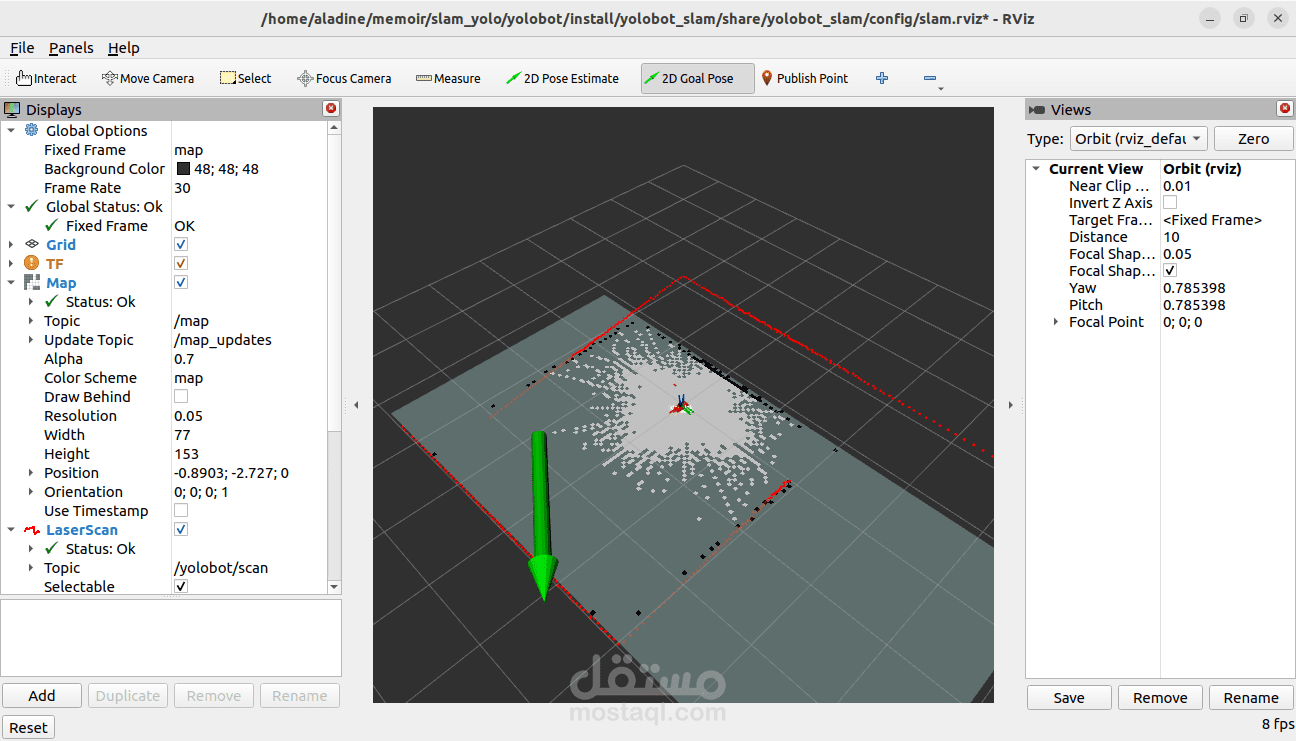
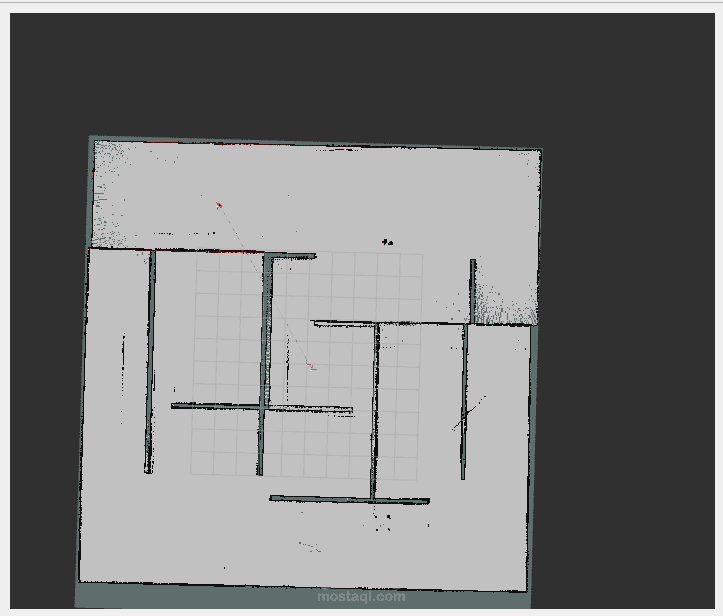
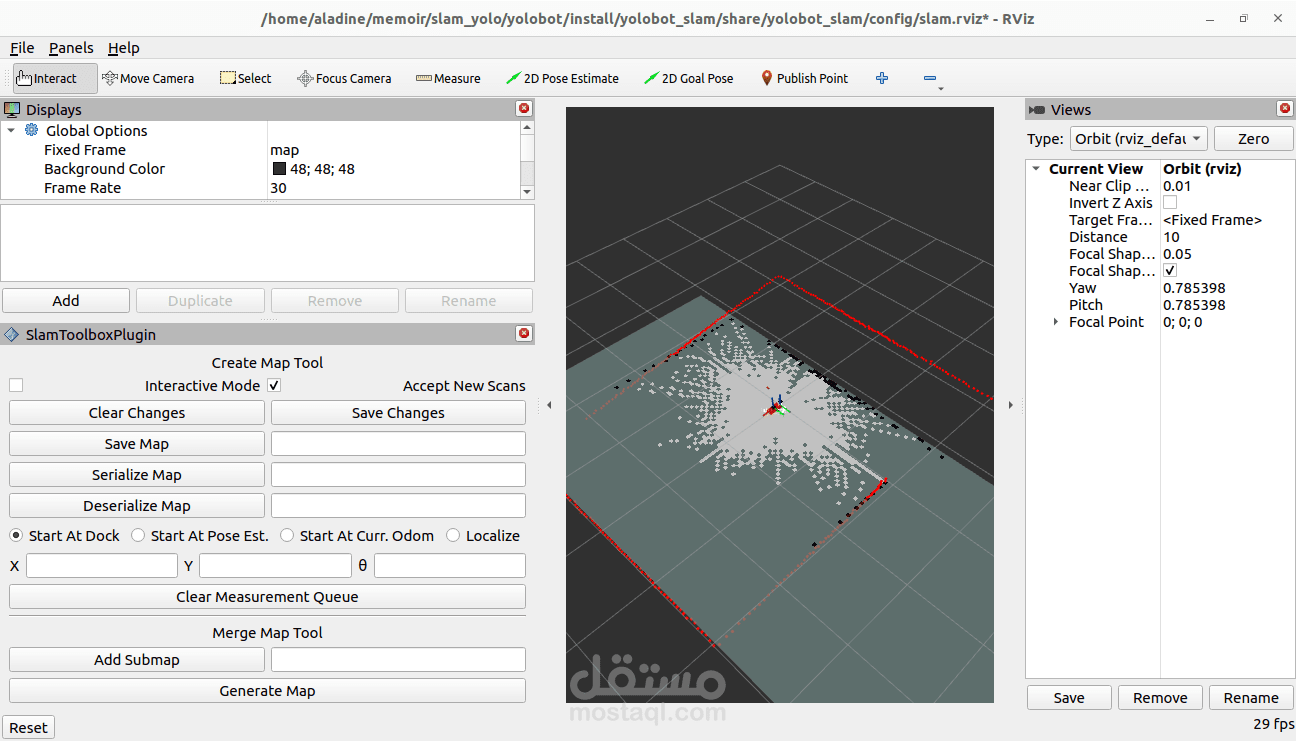
️ تقنية SLAM ثنائية الأبعاد باستخدام LiDAR لبناء الخرائط وتتبع الموقع الذاتي للروبوت.
? إمكانية التنقل الذاتي والتحكم اليدوي باستخدام لوحة المفاتيح.
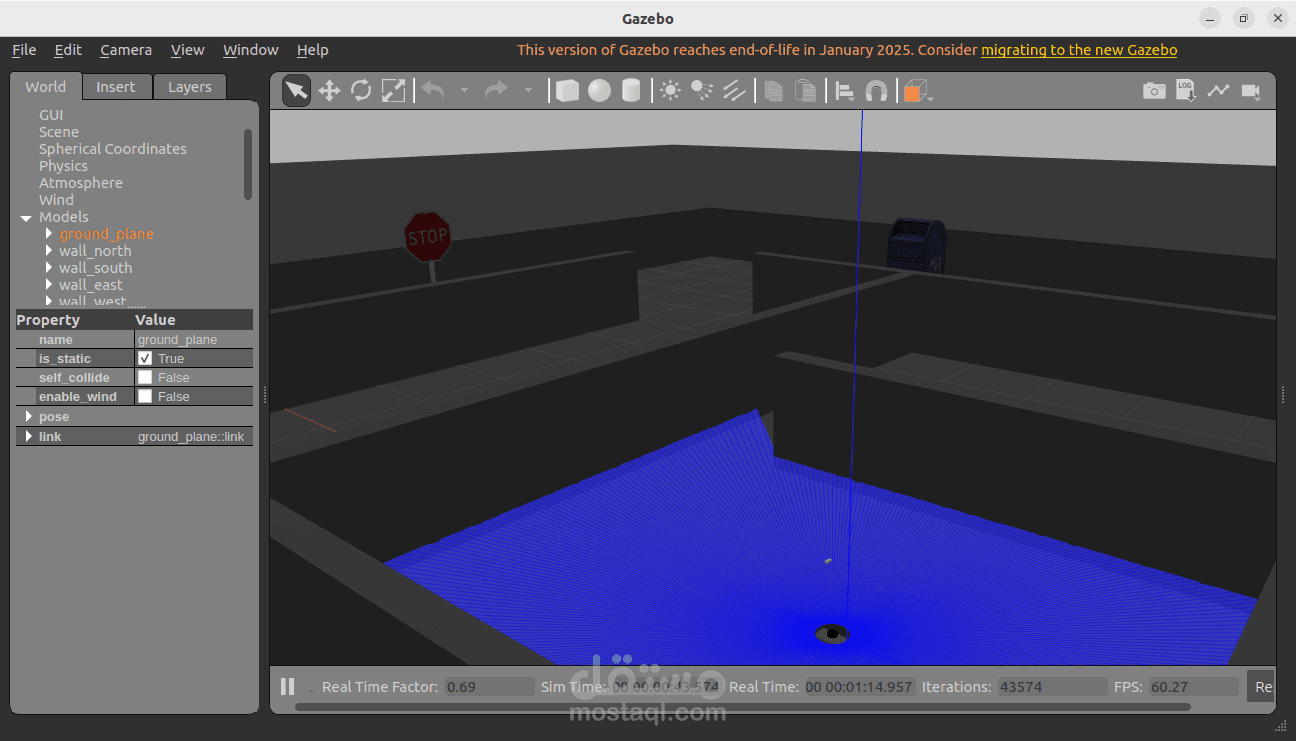
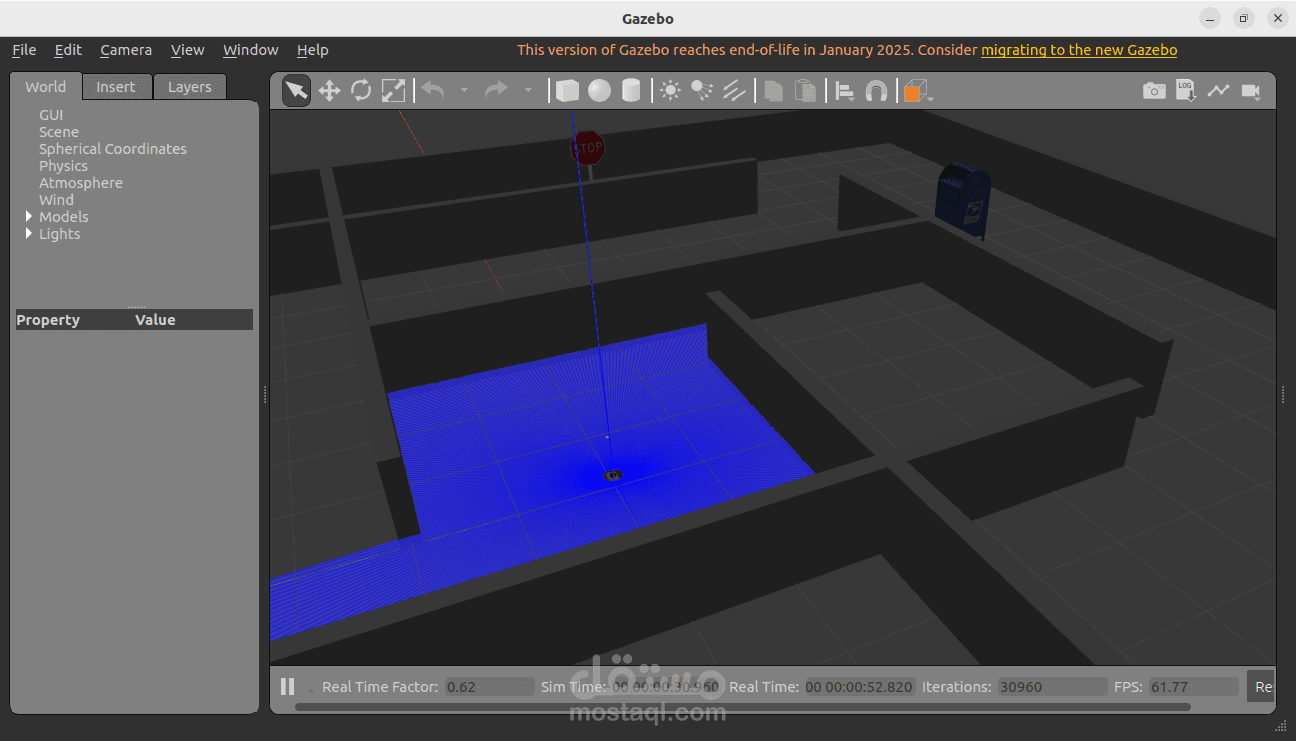
محاكاة كاملة باستخدام Gazebo مع بيئة متقدمة على شكل متاهة لاختبار كفاءة التنقل.
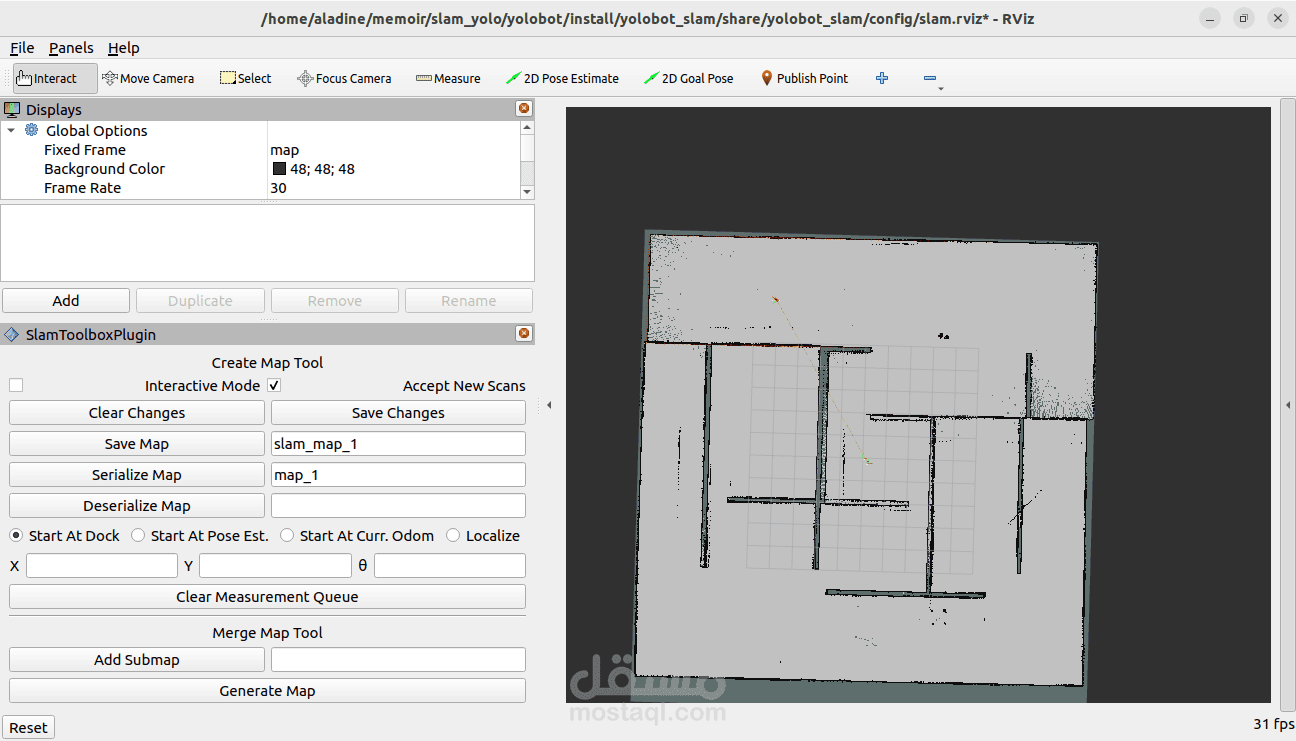
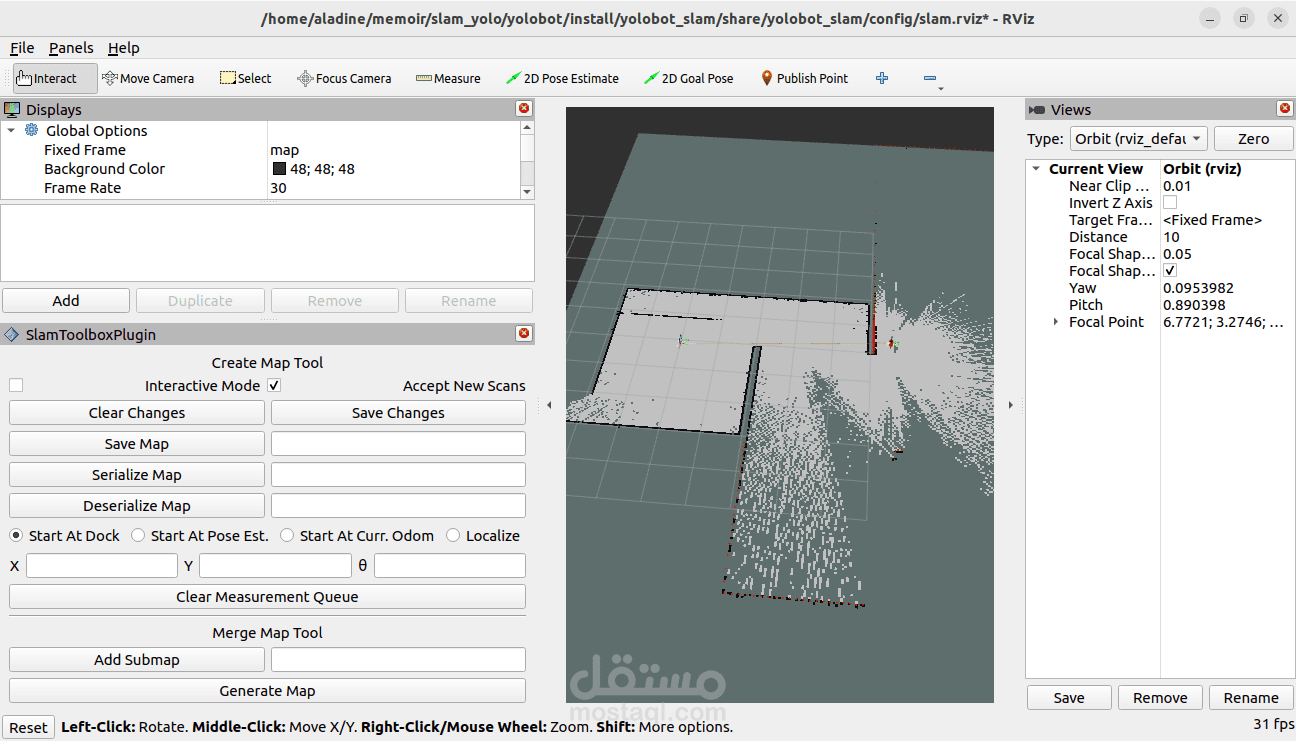
️ تصورات بصرية احترافية باستخدام RViz لعرض الخرائط، الأشعة، والمسارات.
️ ملفات تشغيل موحدة لتسهيل الإطلاق والتحكم في النظام.
مكونات المشروع:
yolobot_control: حزمة التحكم في حركة الروبوت.
yolobot_description: ملفات URDF ونماذج الروبوت.
yolobot_gazebo: ملفات إعداد المحاكاة في Gazebo.
yolobot_recognition: تنفيذ كاشف الأجسام YOLOv8.
yolobot_slam: وحدة تنفيذ SLAM باستخدام slam_toolbox.
yolov8_msgs: رسائل ROS2 مخصصة للتكامل مع YOLO.
تفاصيل تقنية:
دعم كامل لمستشعر LiDAR بزاوية 360°.
أدوات لإدارة الخرائط (الحفظ، التحميل، التعديل).
أدوات للتحكم اليدوي (teleop) أثناء عملية رسم الخرائط.
إعدادات جاهزة في RViz لمتابعة حالة الروبوت والبيئة المحيطة.
تكوين بيئة متاهة خاصة لاختبار SLAM والتعرف على الأجسام.
دعم كامل لتصدير الخرائط وحفظ هيكل الرسم البياني للمسارات.
المتطلبات الأساسية:
ROS2 Humble أو أحدث
Python 3.8+
slam_toolbox
Gazebo
RViz2
استخدامات المشروع:
مشاريع الروبوتات الجامعية والبحثية
التدريب على تقنيات SLAM وYOLO
عروض توضيحية للتقنيات الحديثة في الذكاء الاصطناعي والروبوتات
بناء قاعدة لتطوير روبوتات ذاتية القيادة ذكية