ٌReal time object detection for Autonomous vehicles
تفاصيل العمل



Real Time Object detection & tracking for Autonomous vehicles
Project Title: "Real-Time Object Detection for Autonomous Vehicles"
- I dove headfirst into the challenge of building a cutting-edge system to help self-driving cars see and react to the world around them – spotting vehicles, pedestrians, cyclists, and all the dynamic elements of the road!
- What I Built:
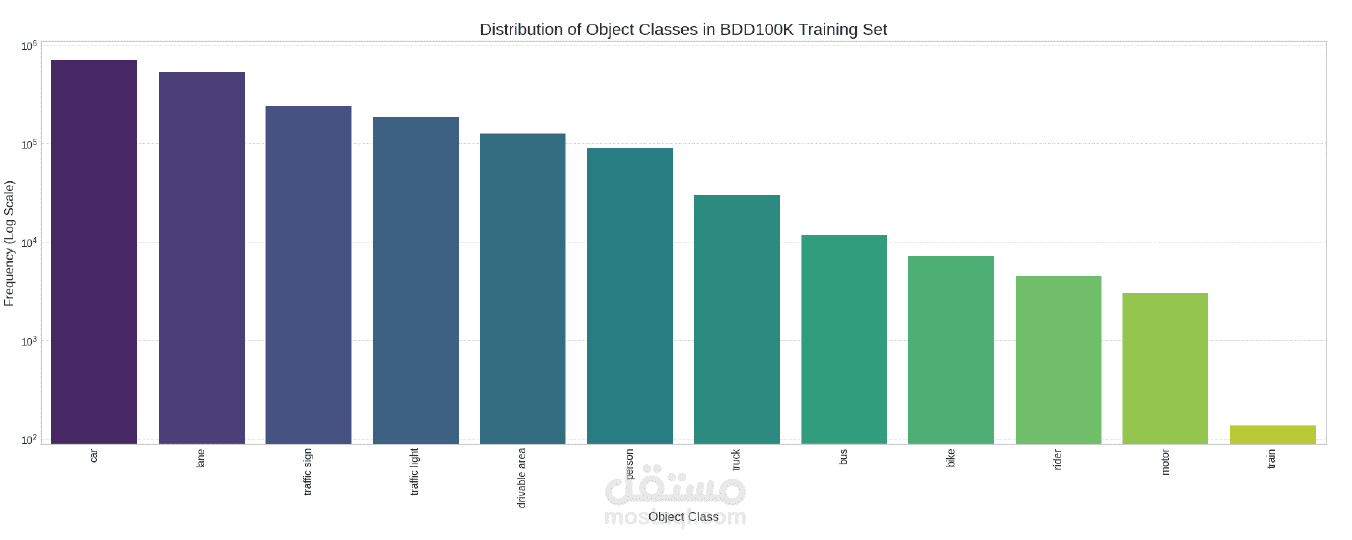
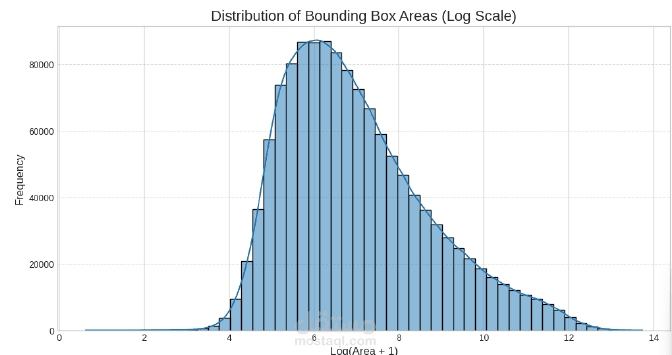
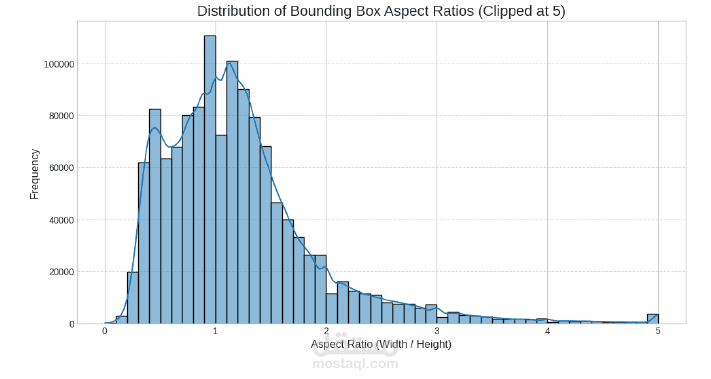
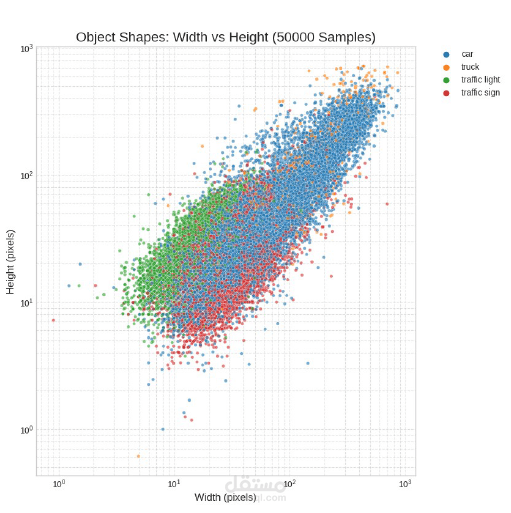
- Tackled the massive and diverse BDD100K dataset, which throws a huge range of real-world traffic scenarios and challenging conditions into the mix. ️
- Got my hands dirty with some serious dataset exploration and clever data augmentation techniques to make my model incredibly robust.
- Focused my efforts on training and fine-tuning the impressive YOLOv8n model, pushing its capabilities for real-time performance. I achieved excellent Intersection over Union (IoU) and an impressive frame rate, making it slick and responsive!
- Tracked every experiment like a pro using MLflow, ensuring everything was reproducible and easy to compare.
- Packaged the final champion model in .pt format, making it ready to be unleashed in real-time applications!
- This project wasn't just an assignment; it was an adrenaline-fueled journey into the real-world AI challenges facing autonomous systems. Covering the whole nine yards – from data prep and wrangling to training, rigorous evaluation, and getting the model deployment-ready. ?