نظام روبوتي مع واجهة
تفاصيل العمل
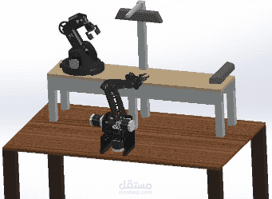
المشروع عبارة عن ذراعين روبوتيات تعملان بالتزامن مع بعضهما.
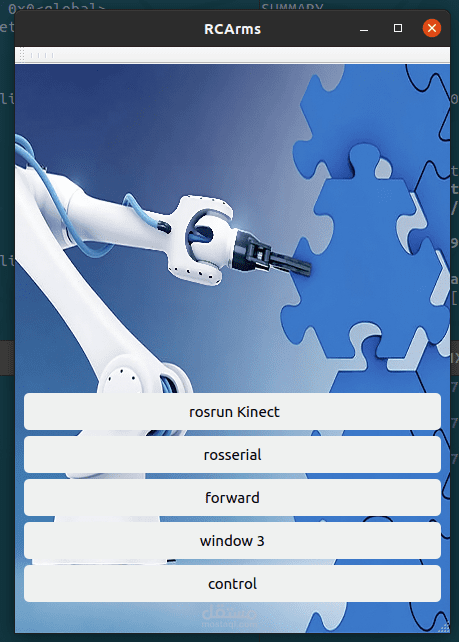
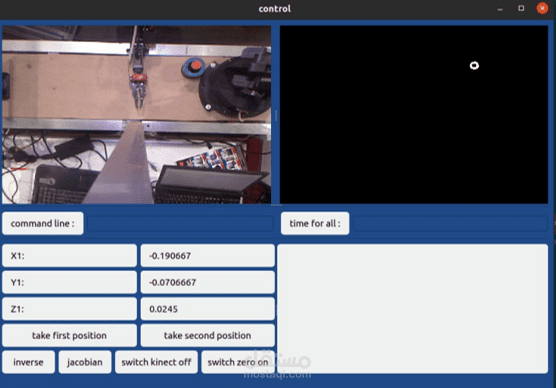
تم تصميم النظام باستخدام لغات برمجة ومكاتب و framework مختلفة، c++, python, Qt, ROS, opencv
يحتوي المشروع على كاميرات ومحركات وحساسات ومتحكمات، جميعها تعمل مع بعضها ضمن النظام الذي قم ببناءه.
حصل المشروع على المركز الثالث ضمن مؤتمر hitech الذي أقيم في دمشق.