محاكاة ملاحة روبوت بالذكاء الاصطناعي – AI-based Robot Navigation Simulation
تفاصيل العمل
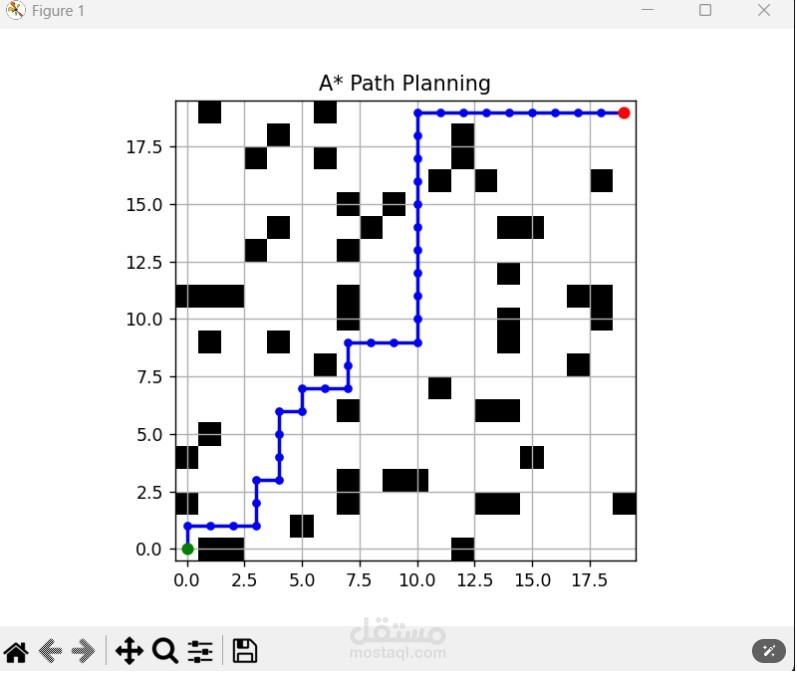
هذا المشروع عبارة عن محاكاة برمجية بلغة Python لروبوت يقوم بالتخطيط لمساره في بيئة ثنائية الأبعاد باستخدام خوارزمية A* الشهيرة. يوضح المشروع كيفية إيجاد الروبوت لأقصر طريق من نقطة البداية إلى الهدف، مع تجنب العقبات الموزعة بشكل عشوائي داخل البيئة.
️ الخصائص:
بيئة شبكية (Grid) ثنائية الأبعاد بحجم قابل للتعديل.
توزيع عشوائي للعقبات لمحاكاة الواقع.
تطبيق خوارزمية A* للبحث الذكي عن المسار.
تصوير مرئي باستخدام مكتبة Matplotlib يُظهر:
شبكة البيئة،
العقبات،
نقطة البداية،
نقطة الهدف،
والمسار الذي تم إيجاده.
مناسب لتعلم مفاهيم الذكاء الاصطناعي الأساسية في مجال الروبوتات بدون الحاجة إلى أجهزة حقيقية.