روبوت ذكي للفحص (تحكم حركي + رؤية حاسوبية)
تفاصيل العمل
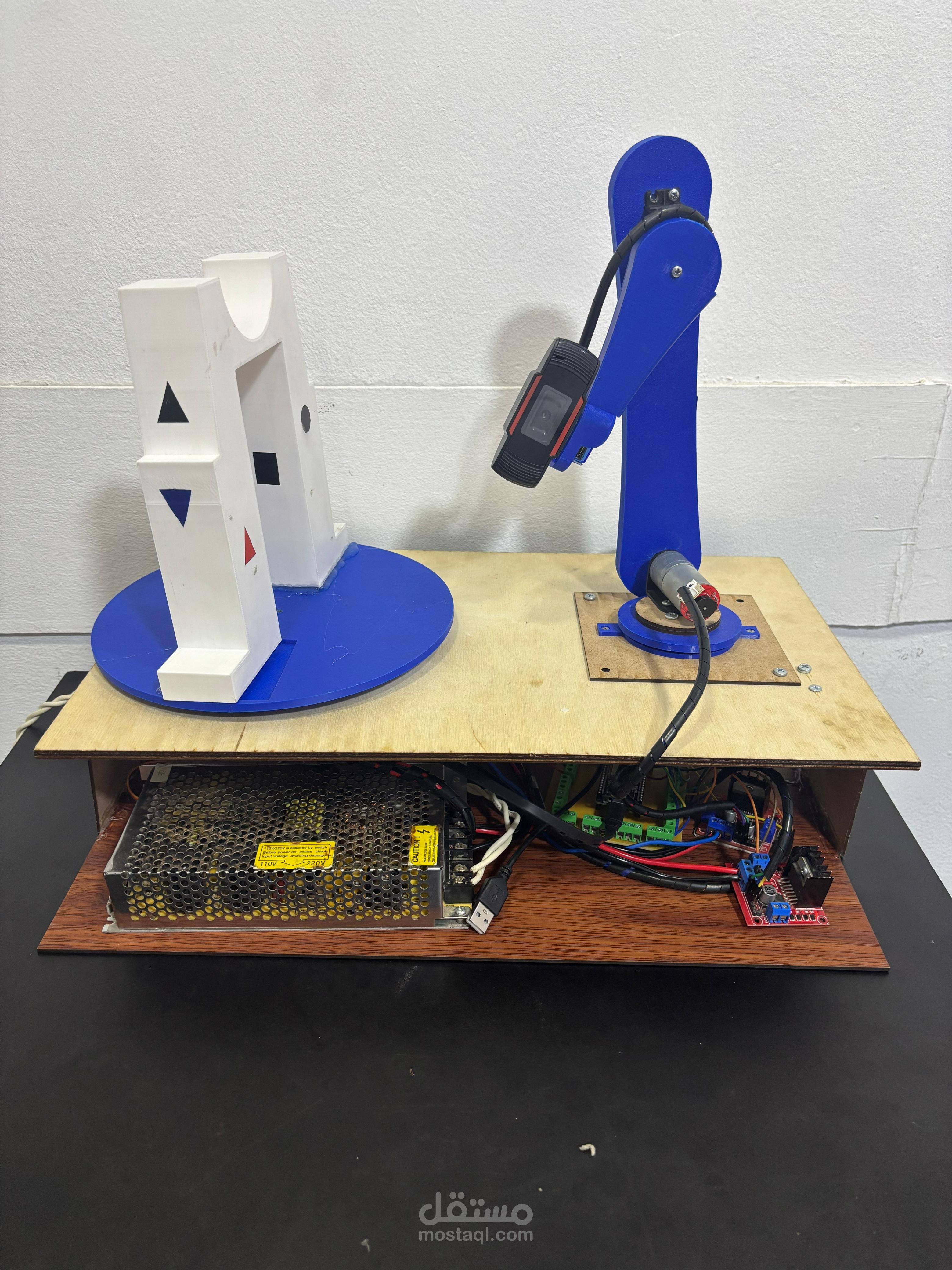
مشروع "نظام الرؤية والتحكم في الروبوت" يتكون من نظامين مستقلين يعملان بالتوازي دون تواصل مباشر بينهما:
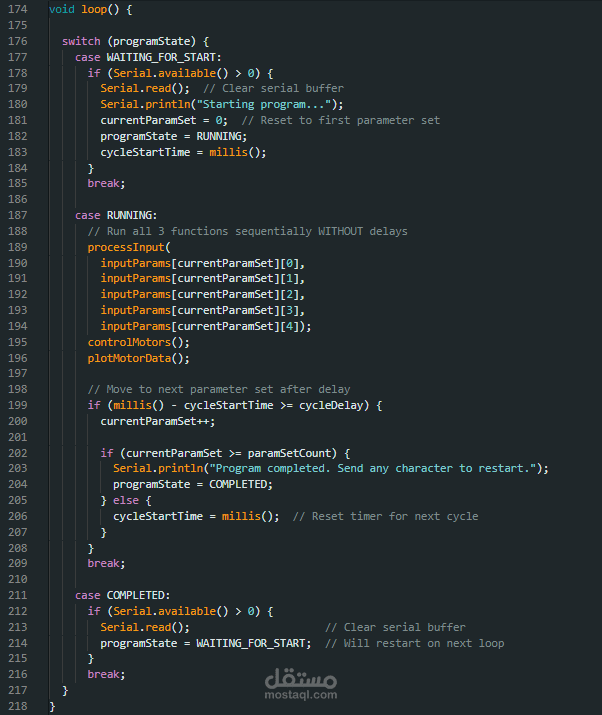
1. نظام التحكم في الروبوت باستخدام ESP32
تم تطوير كود مدمج للتحكم في حركة الروبوت بناءً على منطق مبرمج مسبقًا باستخدام متحكم ESP32. الكود يتحكم في المحركات ويوجه حركة الروبوت بشكل مستقل. المنصة المستخدمة: Arduino IDE
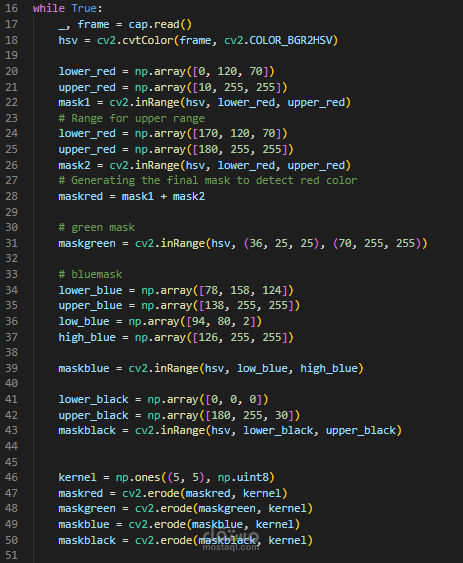
2. نظام الرؤية بالحاسوب
نظام رؤية ذكي يعمل على حاسوب خارجي أو معالج مستقل، يستخدم خوارزميات تعتمد على مكتبة OpenCV لاكتشاف الأشكال والألوان في مدخلات الفيديو أو الكاميرا. هذا النظام يعمل بشكل مستقل دون الحاجة للتواصل مع وحدة الأردوينو. المنصة المستخدمة: Python + OpenCV
طريقة التشغيل
نظام الأردوينو: يتم رفع الكود إلى اللوحة باستخدام Arduino IDE ويبدأ الروبوت في تنفيذ الحركات تلقائيًا.
نظام الرؤية: يتم تشغيل سكربت بايثون لمعالجة الفيديو أو الصور مباشرة.