Line Following Robot
تفاصيل العمل
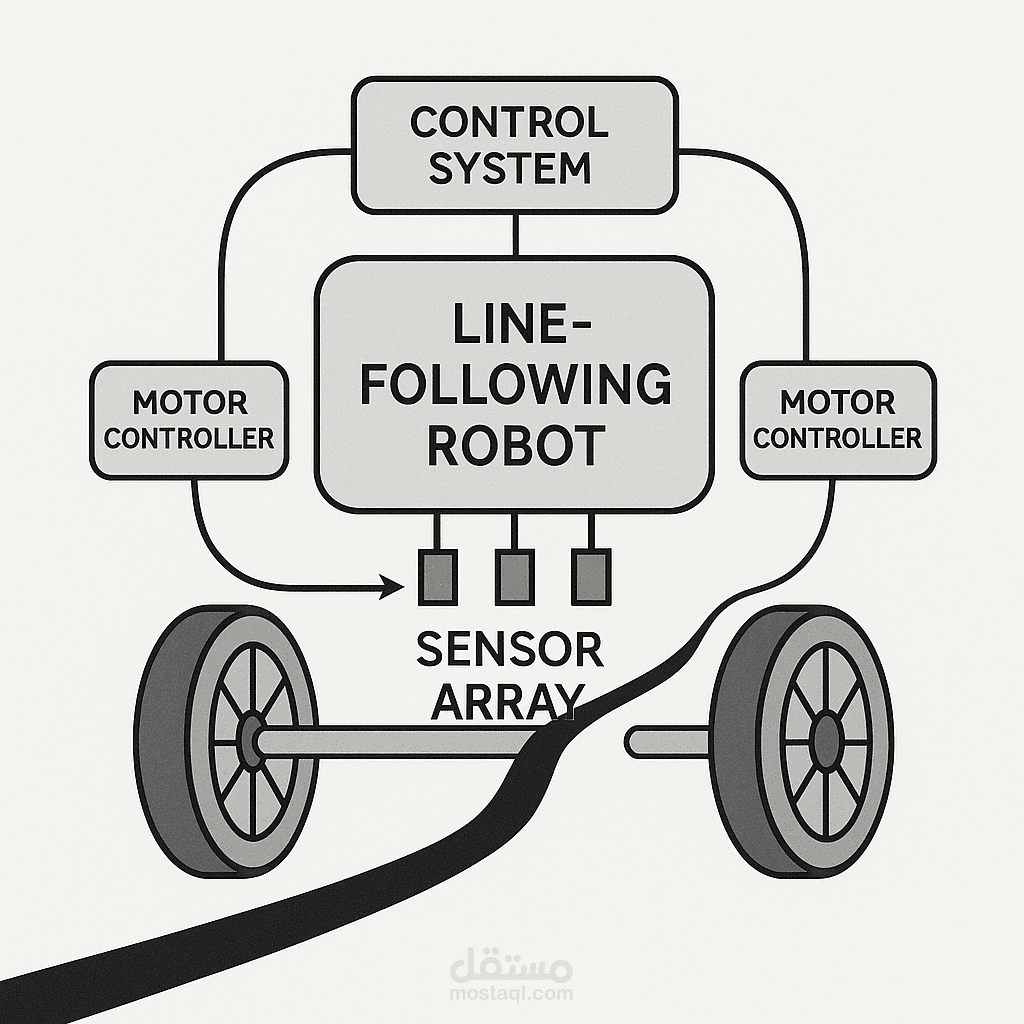
A C++ simulation of a line-following robot that uses a PID (Proportional-Integral-Derivative) control algorithm to track a line based on virtual sensor readings. The project replicates how real-world robots use motor control and sensor feedback to navigate along a defined path.
Features:
•Simulated sensor array to detect line position
•PID control loop for smooth motor output
•Modular components: Robot, Controller, Sensors
•Real-time logging of motor outputs and sensor values
•Structured and well-documented using Doxygen
•Build system with CMake