Autonomus Car
تفاصيل العمل
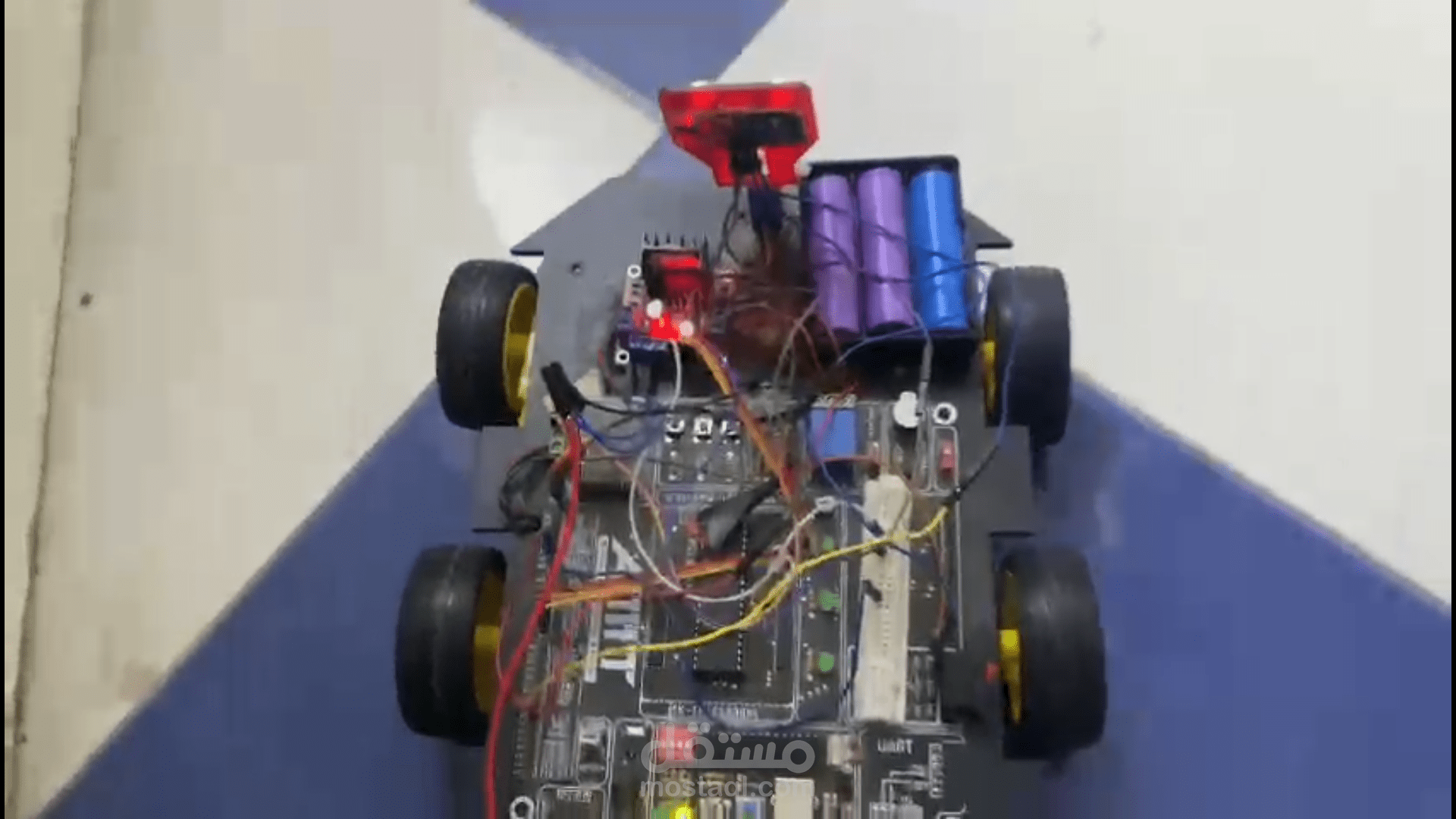

في هذا المشروع، قمت بتطوير نظام قيادة ذاتي يعتمد على مستشعرات ذكية لتحديد الاتجاهات وتجنب العوائق بشكل ديناميكي. يهدف المشروع إلى تحسين قدرة السيارة على التنقل في بيئة محيطة معتمدة على البيانات الحية من المستشعرات.
ميزات المشروع:
استخدام مستشعر الموجات فوق الصوتية (Ultrasonic Sensor) لقياس المسافات بين السيارة والعوائق.
التحكم عبر الميكروكنترولر ATMEGA32 لمعالجة البيانات واتخاذ القرارات المناسبة.
استخدام سيرفو موتور لتحريك المستشعر في الاتجاهات المختلفة (أمام – يمين – يسار) لمزيد من الدقة في تحديد المسارات.
نظام ذكي لاختيار الاتجاه الصحيح بناءً على تحليل المسافات، مما يسمح للسيارة بتجنب العوائق تلقائيًا.
إمكانية تطوير النظام ليشمل ميزات إضافية مثل تتبع المسار أو التعرف على الإشارات المرورية.