Design and Implementation of a Motor Control System Using Simulink
تفاصيل العمل
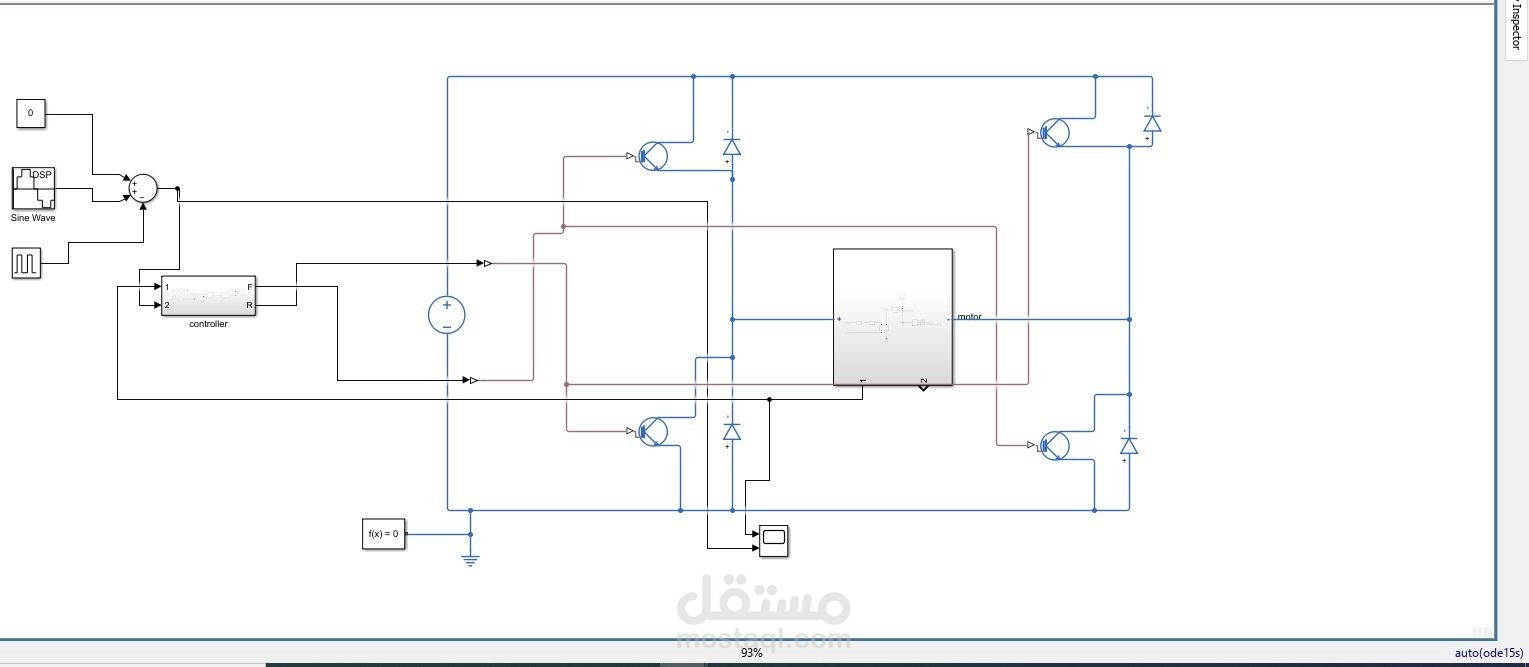
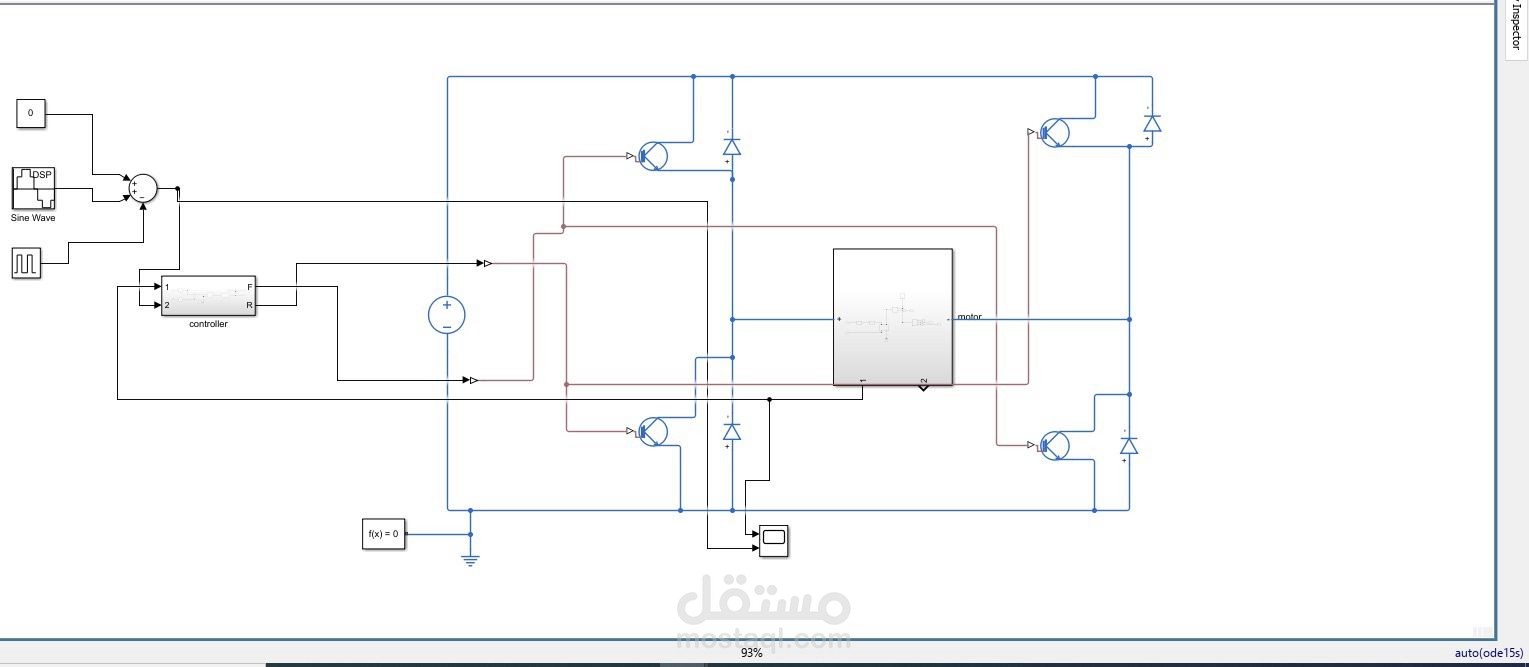
صميم وتنفيذ نظام تحكم في المحركات باستخدام Simulink ️
في هذا المشروع، قمت بمحاكاة نظام تحكم رباعي الاتجاهات للمحرك باستخدام Matlab/Simulink. الهدف الرئيسي كان ضبط وحدة التحكم PI لتحقيق أداء مثالي للنظام.
معاملات وحدة التحكم المستخدمة:
• المعامل التناسبي (Kp) = 1
• المعامل التكاملي (Ki) = 10
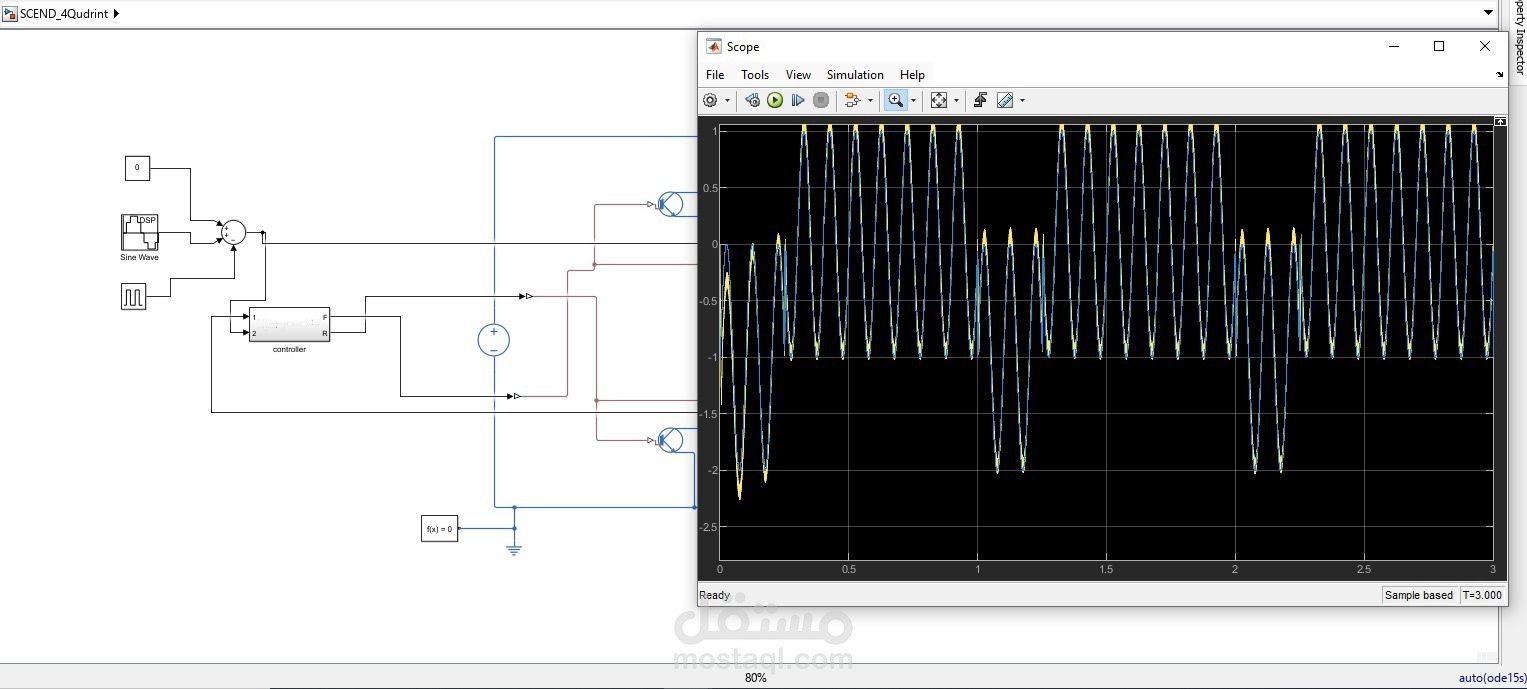
لماذا تم اختيار هذه القيم؟
• Kp = 1 يضمن استجابة متوسطة بدون تجاوز مفرط للقيمة المطلوبة.
• Ki = 10 يحسن الدقة في الحالة المستقرة عن طريق تقليل الخطأ بمرور الوقت.
• معًا، يساعدان النظام على تحقيق توازن بين الاستقرار وسرعة الاستجابة.
النتائج:
أظهرت الاستجابة تحسنًا في أداء النظام مع تقليل التذبذبات وتحقيق استقرار أسرع. أصبح النظام الآن يعمل بكفاءة في جميع الاتجاهات الأربعة، مما يسمح بالحركة للأمام والخلف، بالإضافة إلى الفرملة التجديدية بسلاسة.