implementing A* algorithm for self driving rover
تفاصيل العمل
مشروع: تنفيذ خوارزمية A لمركبة ذاتية القيادة*
وصف المشروع:
يهدف هذا المشروع إلى تطوير روفر ذاتي القيادة قادر على التنقل بذكاء في بيئات تحتوي على عقبات، وذلك باستخدام خوارزمية A* لتخطيط المسار الأمثل. يعتمد الروفر على نظام GPS لتحديد موقعه بدقة، مما يساعده على الوصول إلى الوجهة المطلوبة بأسرع وأفضل طريق ممكن مع تجنب العوائق بفعالية.
التقنيات والمكونات المستخدمة:
خوارزمية A*: لحساب المسار الأمثل بناءً على بيانات الخريطة.
نظام تحديد المواقع (GPS): لتمكين الروفر من تحديد موقعه الجغرافي بدقة أثناء التنقل.
مستشعرات فوق صوتية (Ultrasonic Sensors): لاكتشاف العقبات وضبط المسار أثناء الحركة.
وحدة بلوتوث (Bluetooth Module): لتمكين الاتصال والتحكم عن بُعد عند الحاجة.
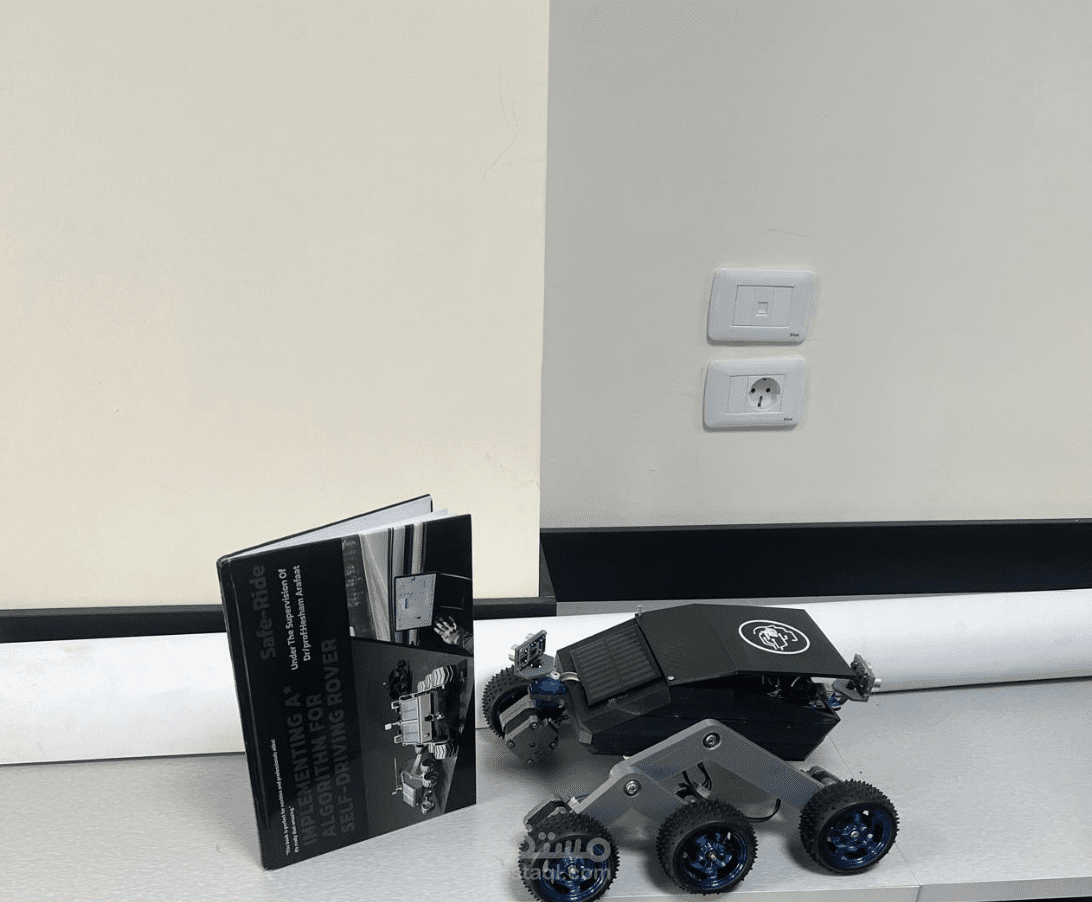
هيكل سداسي العجلات: مصمم للتنقل بكفاءة في البيئات ذات التضاريس الوعرة.
خريطة مدمجة للمكان: تساعد الروفر على فهم البيئة المحيطة واختيار المسارات المثلى.
النتائج:
نجح الروفر في التنقل ذاتيًا عبر بيئات مختلفة، حيث تمكن من اختيار المسار الأمثل باستخدام GPS وخوارزمية A*، مع تجنب العقبات في الوقت الفعلي، مما يعزز كفاءته في المهام الاستكشافية والتنقل الذكي.
التطبيقات المحتملة:
يمكن استخدام هذا النظام في مجالات متعددة مثل الروبوتات المستقلة، المركبات الذكية، أنظمة الاستكشاف، والمركبات ذاتية القيادة في البيئات الوعرة.