تصميم robotic arm
تفاصيل العمل
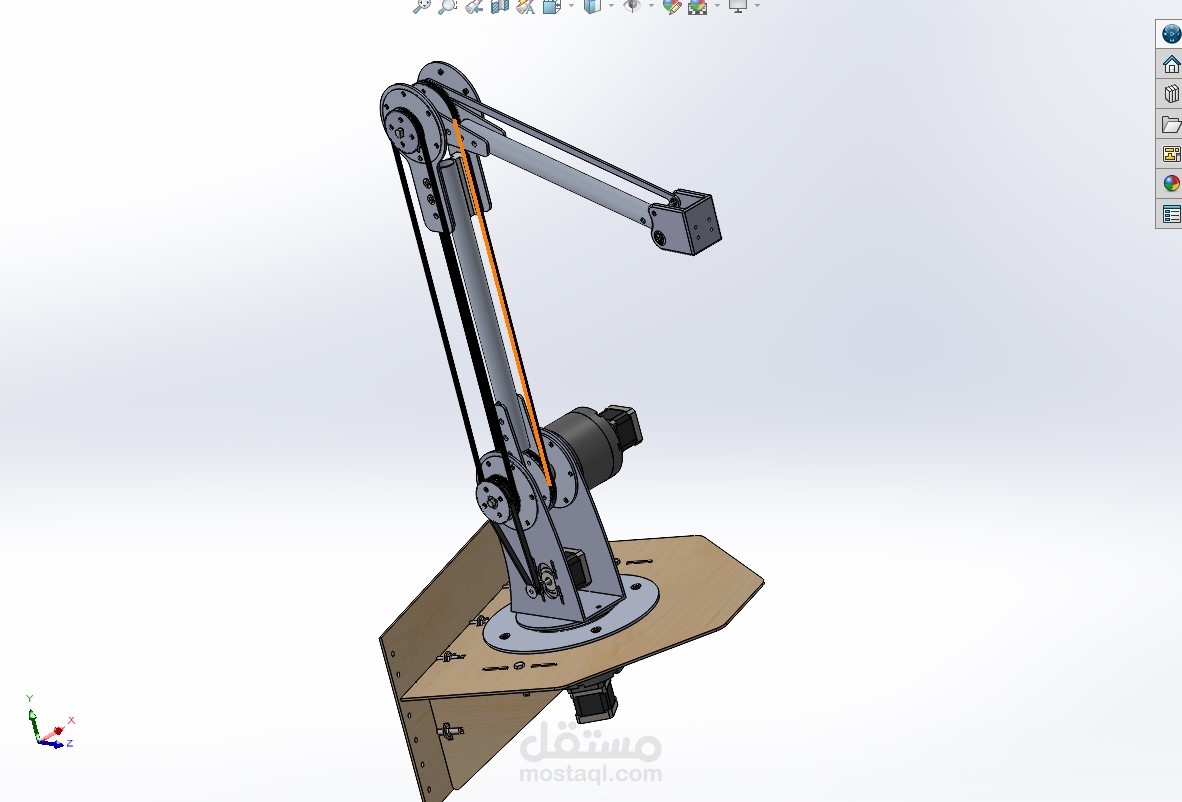
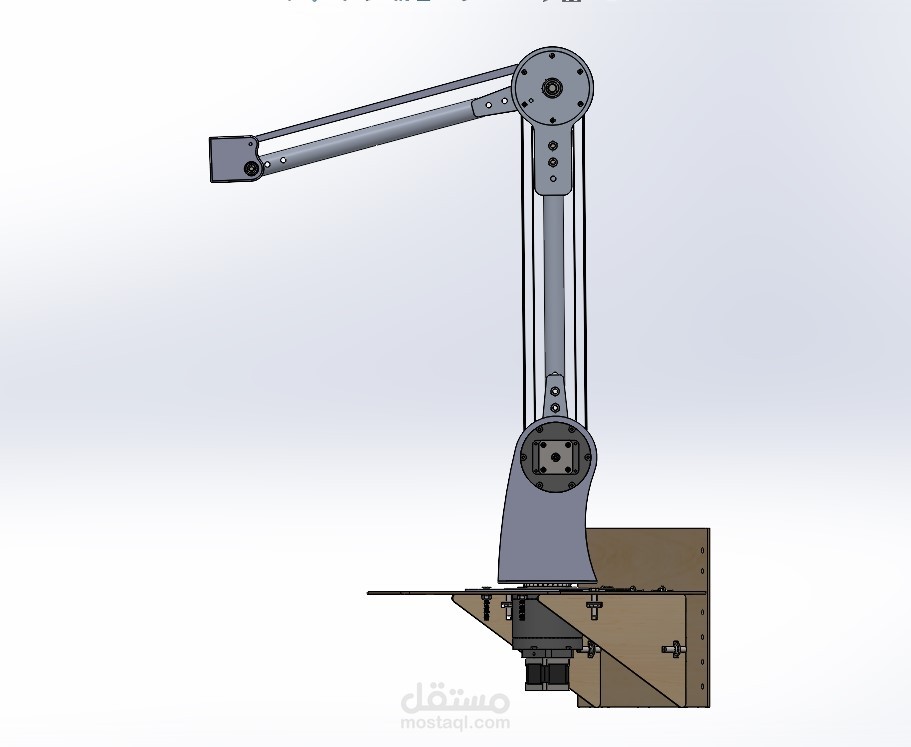
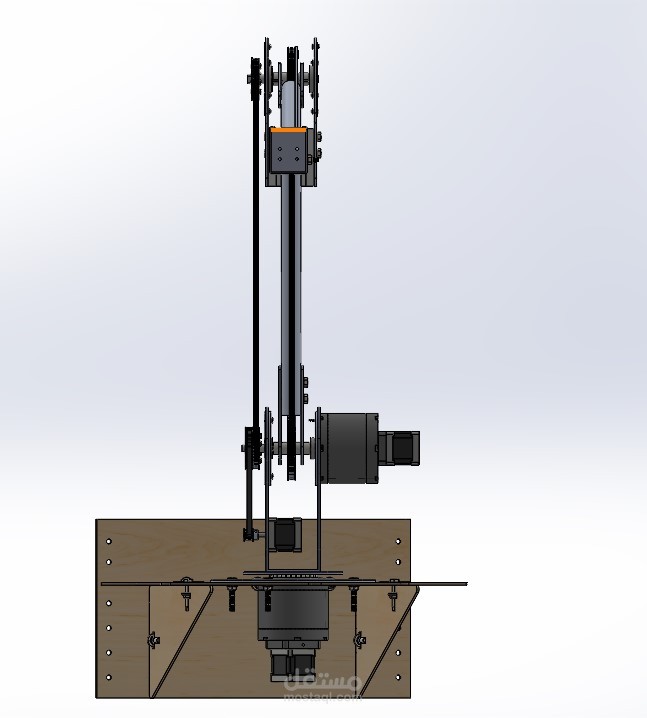
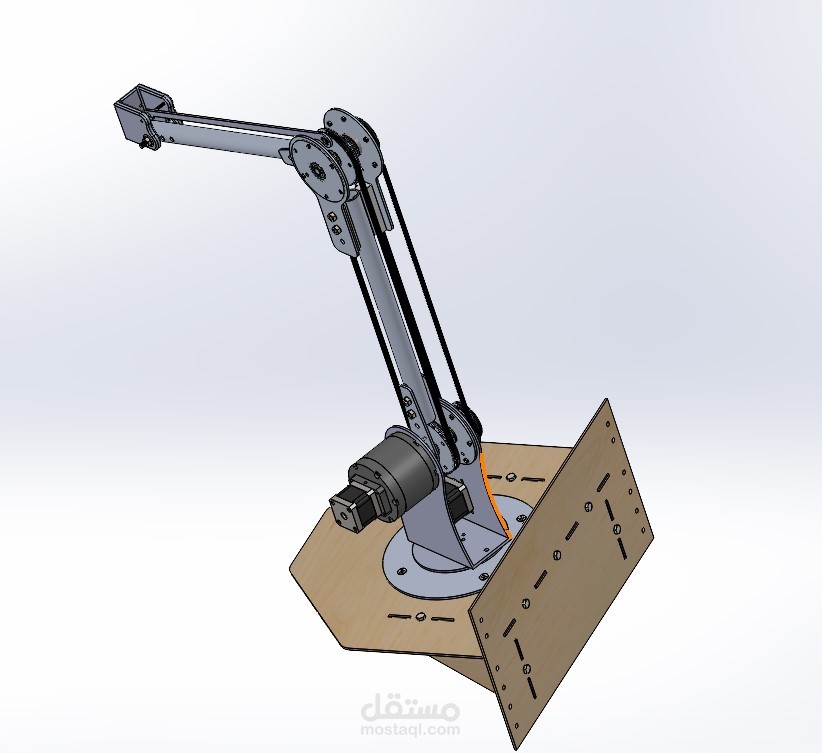
في هذا المشروع، قمت بتصميم وتطوير ذراع روبوتية مثبتة على روفر متنقل، بهدف تحسين استكشاف البيئات المختلفة والتقاط صور وفيديوهات دقيقة من زوايا متعددة. تعتمد الذراع على محركات خطوة (Stepper Motors) لتوفير حركة دقيقة وثابتة، مما يسمح بتوجيه الكاميرا بسلاسة لمتابعة الأهداف أو استكشاف المناطق الوعرة.
مزايا الذراع الروبوتية:
تحكم دقيق في الاتجاه والحركة باستخدام محركات خطوة.
قدرة على الدوران والميلان لالتقاط صور بزوايا مختلفة.
تصميم خفيف الوزن للحفاظ على استقرار الروفر أثناء الحركة.
إمكانية التحكم عن بعد باستخدام واجهة برمجية أو وحدة تحكم لاسلكية.
تكامل مع أنظمة معالجة الصور والذكاء الاصطناعي لتحليل المشاهد في الوقت الفعلي.
التقنيات المستخدمة:
محركات خطوة (Stepper Motors) مع درايفرات تحكم لضبط زوايا الحركة بدقة.
كاميرا عالية الدقة متوافقة مع Raspberry Pi.
اتصال لاسلكي (Wi-Fi أو Bluetooth) لنقل البيانات والتحكم عن بعد.
يهدف هذا المشروع إلى دعم مهام الاستكشاف والبحث والإنقاذ والتصوير التلقائي، مما يجعله مثاليًا للتطبيقات في البيئات الوعرة، الكهوف، والمساحات الواسعة التي يصعب الوصول إليها يدويًا.