Back-stepping Prescribed-Time Sliding Mode Control of a Quadrotor UAV
تفاصيل العمل
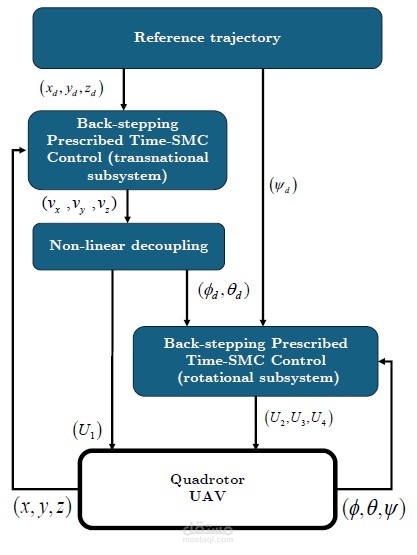
This project, which has been accepted as one of the IEEE papers in iCRoM conference in Iran, presents a Back-Stepping Prescribed Time Sliding Mode Control (BPTS) for a quadrotor UAV, ensuring that the error trajectories reach zero within a predefined time "tp", regardless of initial conditions. By integrating back-stepping with prescribed-time sliding mode control, the proposed method enhances tracking accuracy and robustness against disturbances. The control scheme is validated through simulations, where the quadrotor successfully follows a rectangular reference trajectory, demonstrating precise tracking and fast convergence.
I have simulated the Closed-loop dynamics in MATLAB, and write the paper in LaTeX.