3D Modelling and Trajectory Tracking Simulations of a Quadrotor with Sliding Mode Control Using MSC Adams and Simulink
تفاصيل العمل
In this project, the primary objective was to develop and simulate a comprehensive 3D model of a quadrotor UAV, integrating it with a Sliding Mode Control (SMC) algorithm for precise trajectory tracking. The first step in the process involved designing the quadrotor model in SolidWorks, where the physical components such as the frame, rotors, motors, and other mechanical structures were meticulously modeled. SolidWorks provided the platform to create an accurate and detailed design, reflecting the necessary geometries and kinematics of the quadrotor. This model was then exported into MSC ADAMS, a powerful multibody dynamics simulation software that facilitates the modeling of complex mechanical systems.
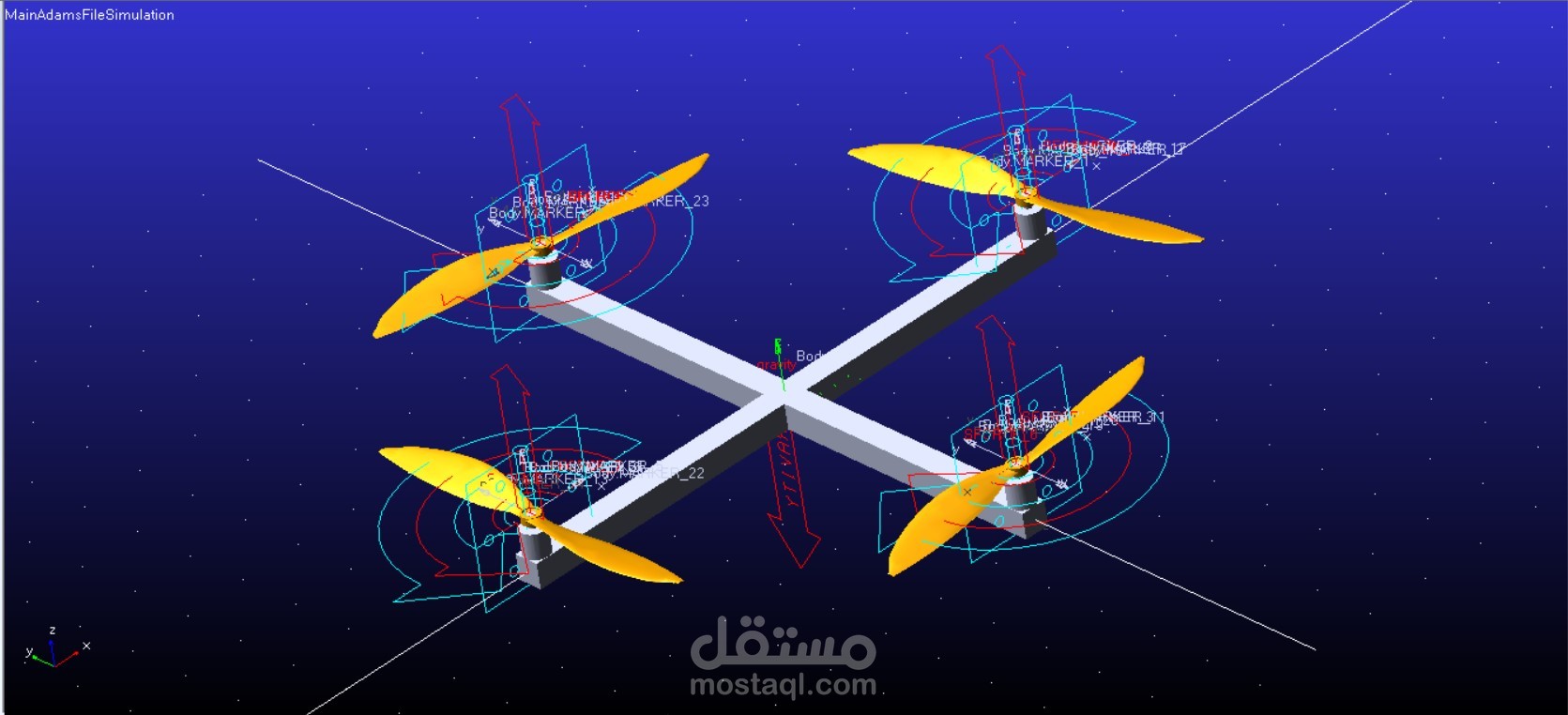
Once the model was imported into MSC ADAMS, the next phase focused on applying the principles of rigid body dynamics to simulate the quadrotor’s movements in a 3D space. The integration with MSC ADAMS allowed for realistic simulations of the quadrotor’s mechanical behavior, including the interaction between various parts, such as the rotors and the body. The software also provided the capability to simulate the physical forces acting on the quadrotor, such as thrust, drag, and gravity. With ADAMS handling the mechanical dynamics, the system was ready to be integrated with a control system to ensure that the quadrotor could follow a desired trajectory under the influence of various forces and disturbances.
The final stage of the project involved co-simulation in MATLAB Simulink, where the control algorithms, specifically the Sliding Mode Control (SMC), were implemented to regulate the quadrotor's trajectory. MATLAB Simulink provided the necessary environment to develop and simulate the control laws, while the model created in MSC ADAMS was interfaced to simulate real-world physical dynamics. The SMC was designed to ensure that the quadrotor could precisely track a given trajectory while rejecting disturbances and uncertainties in the system. The feedback loops and control inputs in Simulink were directly linked to the outputs from the ADAMS model, allowing for a dynamic and synchronized simulation of the quadrotor’s response to the control inputs.
Throughout the project, the results obtained from both MATLAB and MSC ADAMS simulations were thoroughly compared, and the outcomes showed a perfect match, validating the consistency and accuracy of the co-simulation. The integration of SolidWorks, MSC ADAMS, and MATLAB Simulink demonstrated the ability to accurately model, simulate, and control a complex UAV system in a seamless workflow. This successful co-simulation ensures that the developed model and control system are robust and ready for further development and testing, ultimately paving the way for real-world implementation and optimization of the quadrotor system.