Smart Robotic Arm Playing Chess
تفاصيل العمل
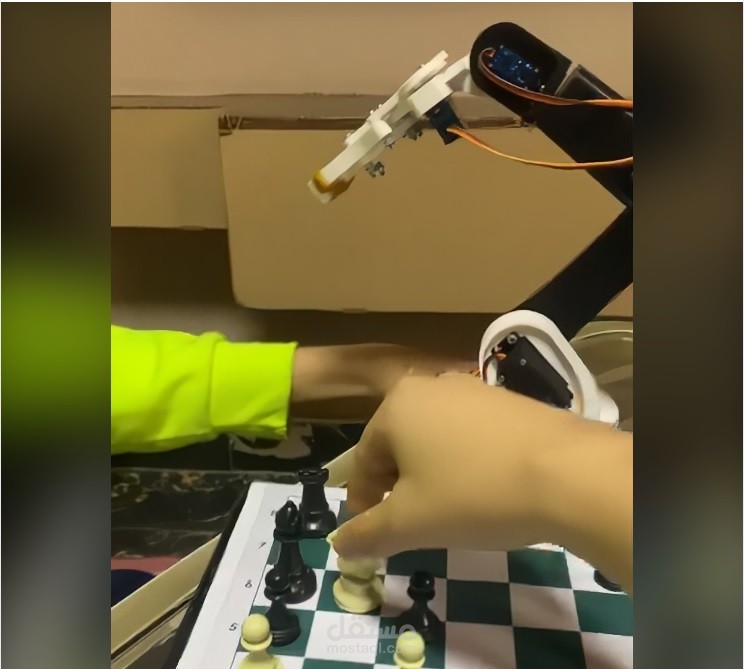
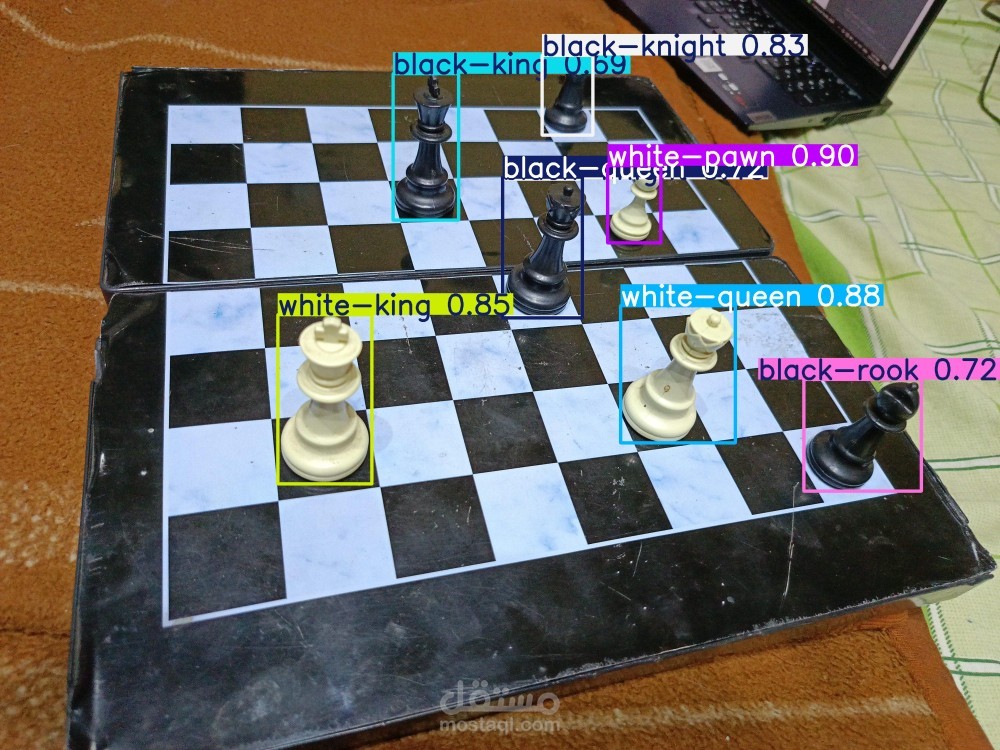
مشروع مصمم لتنفيذ عمليات لعبة الشطرنج باستخدام الرؤية الحاسوبية وتعلم الآلة. يعتمد على مكتبة OpenCV في لغة بايثون وخوارزميات معالجة الصور لاكتشاف لوحة الشطرنج، كما يستخدم نموذج YOLO للتعرف على قطع الشطرنج.
في جانب الحركة، يستخدم الذراع مبدأ الحركيات العكسية (Inverse Kinematics) لحساب الزوايا الدقيقة للمفاصل، مما يتيح تحريك القطع بسلاسة ودقة عالية. يجمع هذا المشروع بين الأتمتة والذكاء الاصطناعي والتحكم الميكانيكي، مما يجسد تكاملاً عملياً بين الروبوتات وأنظمة الرؤية.
تم العمل على هذا المشروع من طباعة القطع المستخدمه ( 3D-Printing ) إلى تركيبها وبرمجتها بواسطتي أنا وفريقي المكون من 3 أفراد.