ذراع روبوت
تفاصيل العمل
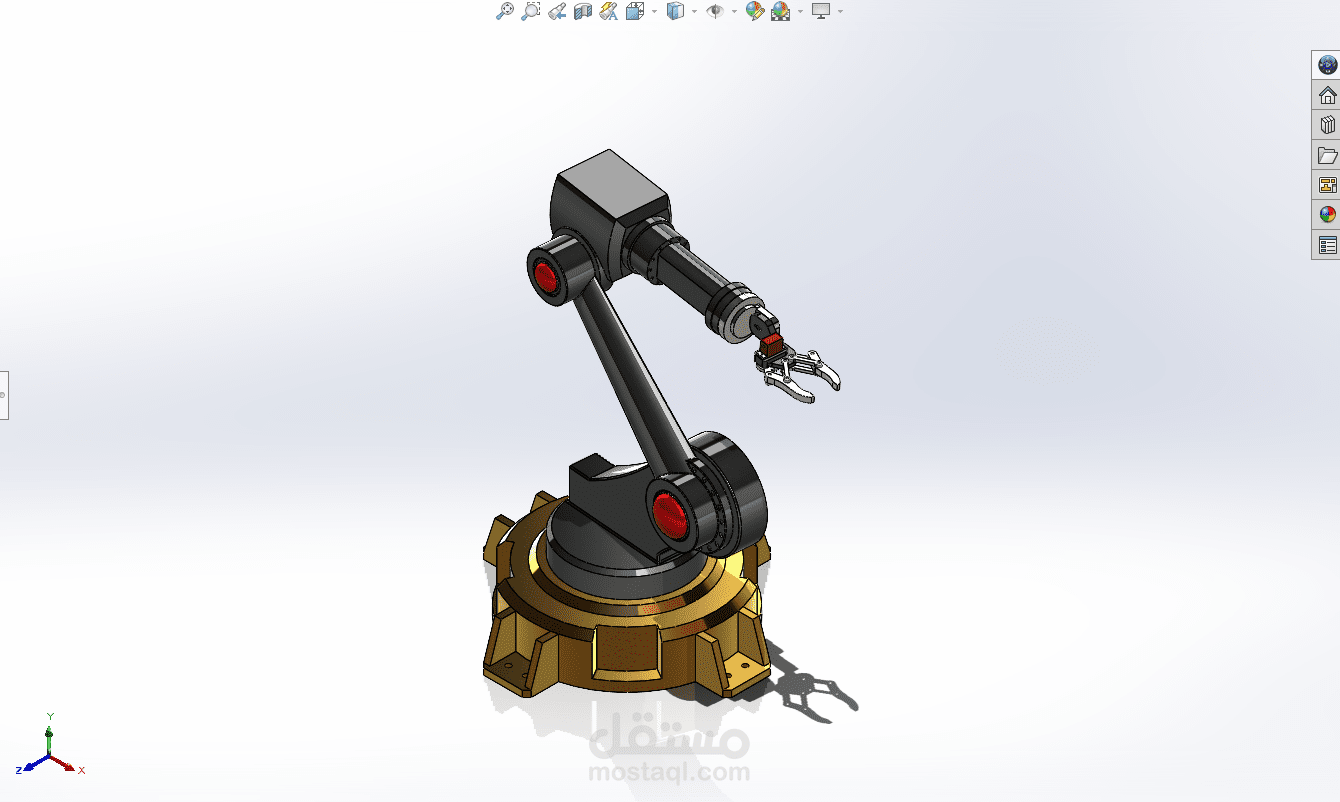
تم تصميم الذراع الروبوتية باستخدام برنامج SolidWorks مع التركيز على القابلية للتعديل والدقة. تم تصنيع المكونات باستخدام الطباعة ثلاثية الأبعاد باستخدام مادة PLA، حيث تم تحسينها لتحقيق القوة وخفة الوزن وسهولة التجميع. يضمن التصميم تقليل الدعامات وحركة سلسة في جميع الوصلات، مما أدى إلى ذراع روبوتية عملية وذات مظهر احترافي.